RV�p���������l�ʵ��о�
RV�p������Ҫ���ڙC�����У����C���ˌ��߶�λ���Ⱥ͵����ˮƽ��Ҫ��dz��������߀��횿��]RV�p�����ĄӑB���ԣ�����������Ƶ��ܵ͵�ˮƽ����ˣ����n�}��������Ԫ����ܛ��ANSYS���p�����Ĺ����l���M�����о�������������Ƿ��_��Ҫ��
5.1�Y����ӷ�����Փ
�p������Ҫ�əC�ܡ��X݆���S���S�е�Ԫ���M�ɣ����ڴ��ϵ�y���ڃȲ����ⲿ�������l���Cе��ӡ����ϵ�y�Ĺ������ԣ�һ����������l�ʺ����ͣ�����ϵ�y�ĄӑB����֮һ����ϵ�y�ĄӑB푑������d�ɵĮa���c���f�Լ�ϵ�y��ӵ���ʽ�Ⱦ�����Ҫ��Ӱ푡����Y���ڄ��d�������������F�����ĄӑB�����ǽY�������W�Ļ����΄ա�
�Y�������W�г��õķ���ģ���Ǽ��Ѕ���ģ�ͣ����Ѕ���ģ�����ó��ַ��́������ģ����ڼ��Ѕ���ģ������õ�������Ԫģ��

��5-1��
���У�M��c��K�քe�鿂�w�|����ꇡ������ꇺ̈́��Ⱦ�ꇣ�

��

��

��Y���ļ��ٶ��������ٶ������͞�λ��������f(t����Y���ļ�����������
���o�������ã���f(t)=0���t�õ�ϵ�y��������ӷ��̡�����Y��������ӵ��l�ʺ����ͼ���Y���Ĺ����l�ʺ������͕r�����ጦ����Ӱ푲�����ˣ�����헿�����ȥ���@�r�o����������ӵ��\�ӷ��̞�

��5-2��
�˕rϵ�y����n�������l�ʺ�n�������͡�ÿһ���l�ʺ����ʹ���һ�������ɶ�ϵ�y��������ӡ��@�N��������ӕr�Y�������еĻ���������ԷQ��Y����ģ�B�������ɶ�ϵ�y��������ӿ��Էֽ��n�������ɶȵĺ��C��ӵįB�ӣ������fϵ�y�����������n������ģ�B��ӵľ��ԽM�ϡ��@��ζ�������ɶ�ϵ�yһ���f��������ijһ�������l�ʵ�������Ӷ��������������l�ʵĺ��C��ӵĺϳ���ӡ�
�O�����ɶ�ϵ�y���������ijһ���C�����ʽ�Ľ��

��5-3��
�t

��5-4��
��ʽ��5-3),(5-4������ʽ��5-2���ɵ�
��K-��
2M��

=0 ��5-5��
��� ��������������Ա������µ��l�ʷ���
det��K-��2M��=0 ��5-6��
���ǝM���l�ʷ��̵� �ͦؾ�����ԓ�������ϵ�yijһ�A�Ļ���������ԣ���ϵ�y��ijһ�Aģ�B�����ʽ��5-6���õ�n������ֵ������ֵ����ԓϵ�y�ĸ��A�����l�ʹ����l�ʾ����������c��(l�������l�ʃH��ϵ�y���е��|���̈́������P������缤��o�P���o����ϵ�y�Ĺ����l�ʾ�����������(2�������l����ϵ�y̎�ں��C��ӕr���l�ʣ������ɶ�ϵ�y̎�ں��C�����ָ�����ɶ�ϵ�y���|�c��̎�ں��C��Ӡ�B��(3��������С�������У�����1�ܦ�2�ܡ��ܦ�n��
�����A�����l�ʦ�i��(i-l,2������n�����δ��뷽��ʽ��5-6����õ�n��������������ϵ�y��n�������͡��������c�����l����һһ�����ģ���ͬ�Ĺ����l�ʌ�������ͬ�������͡�
5.2ģ�B��������
�Y���ӑB�OӋҪ������Y���Ą��d���r���������Y������Ĺ���Ҫ���OӋ�ʄt�����սY�������W�ķ��������͌��������M�з�����Ӌ�㣬���Y��ģ�B�����ǽY���ӑB�OӋ�ĺ��ġ����������濴��ģ�B��ʾ��o����������ӕr�ĸ��A�����l�ʺ������ͣ��������Y���Ĺ����l���Լ��ڸ��A�l���½Y��������׃�Ρ����y�ĄӑB����ֻ���ڙC���Ƴɺ��ڕr��Ȝy���C�����P�Y��������������x�����ɜy�c�y����λ�ơ��ٶȼ����ٶ��S�r�g׃�����������@�N��������ֱ���˽�ϵ�y�ĄӑB�����Լ�푑��ͽY��֮�g���Pϵ����˼Ȳ����ҳ��a��ij�N푑���ԭ���������OӋ�A�ξ��AҊ��ӑB���ԡ�����֮�£�ģ�B��������Ҫ���@����Ҋ��
���Y���M��ģ�B������ANSYS�ď�����֮һ��ģ�B�������ڴ_���OӋ�еĽY����C��������������ԣ������l�ʺ����ͣ���������^����Ҫ���Ă����E�M�ɣ�
1.��ģ
��ģ�^���б��ע�������c��
(l����ģ�B������ֻ�о����О�����Ч�ģ����ָ���˷Ǿ��Ԇ�Ԫ�������龀�Եā팦����
(2���������|�����Ǿ��ԵĻ�Ǿ��Եġ�����ͬ�ԵĻ����������Եġ��㶨�Ļ��c�ض����P�ġ���ģ�B�����б��ָ������ģ��Ex����ij�N��ʽ�Ą��ȣ����ܶ�DENS����ij�N��ʽ���|���������Ǿ������Ԍ������ԡ�
2.���d�����
(l���x��һ�N���m��ģ�B��ȡ���������x��ģ�B��ȡ�����У�
1)Subspace�����ӿ��g������ԓ�����m���ڴ��͌��Q����ֵ��↖�}�������ÎN�������x헁������ӿ��g�����^�̡�
2)Blook Lanozos�����։K���m��˹�������m���ڴ��͌��Q����ֵ��↖�}��
3)PowerDynamics�����˷����m���ڷdz����ģ�ͣ�100000�����ɶ����ϣ��������m����ֻ���Y��ǰ���Aģ�B�����˽�Y�������푑������Σ����������x����m����ȡ������subspace��Block Lanczos�������K�Ľ⡣
4��Reduced Householder������˹�����·���������Subspace���죬�������^�͡�
5��Unsymmetric�����nj��Q����, ԓ�����m����ϵ�y��ꇞ�nj��Q��ꇵĆ��}���������wһ�Y������Æ��}��
6)Damped������Ҫ��������ɺ��ԵĆ��}�����S�І��}��
�ڴ���������^���Ќ��x��Subspace����Block Lanczos����Reduced Householder����PowerDynamics����Unsymmetric����Damped��ֻ�����������²ŕ��õ�����˱��n�}�зքe����ǰ�ɷN�����M�������,�õ���ͬ�ĽY����
(2����ģ���ϼ��d�ɡ��ڵ��͵�ģ�B������Ψһ��Ч�ġ��d�ɡ�����λ�Ƽs���������ij��DOFָ̎����һ������λ�Ƽs������������λ�Ƽs�������ԓDOF̎���O�á�����������͵ļs�����������������ضȡ����ٶȵȣ�������ģ�B������ָ��������ģ�B��ȡ�r�������ԡ�
3.�^��Y�����Y�����������l�ʺ����͡�
5.3 RV�p��������Ԫģ�͵Ľ����������Y��
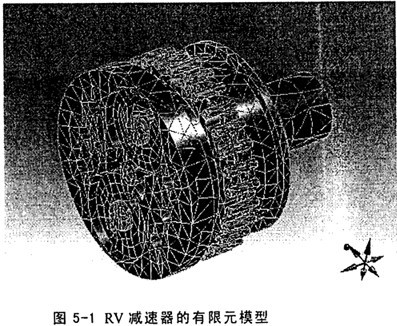
��UG�еĎ�ģ�͌��뵽ANSYS�У�������AWEģ�K���Ԅӵ��־W��ʩ�ӽ��|���ڌ��Cеϵ�y�M������Ԫ�����r����������ģ�����_����Ҫ��������ȵ�ǰ����ԓ�M�����Σ��@�ӿ��Թ�ʡӋ��r�g����˿��]����X���c�C��̽Y����Ӱ푷�������������Ԫģ��ǰ����X��ȥ��������RV�p�����x�ð˹��c�����w���w��Ԫ�턝�־W�����֞�56139����Ԫ��97246�����c�����־W��������Ԫģ����D5-1��ʾ��ͬ�rAWEģ�K�������O���Ľ��|�z�y���g϶�`���̎�O��0�����ԄӶ��x���|��֮����ݔ���S��ʩ�ӹ̶��s���������M��ģ�B��⡣����AWEģ�K�M��ģ�B�����Ȃ��y��ANSYS�M��ģ�B�����^�̺��Ρ����㡢���ýY��Ҳ�dz��ʴ_��
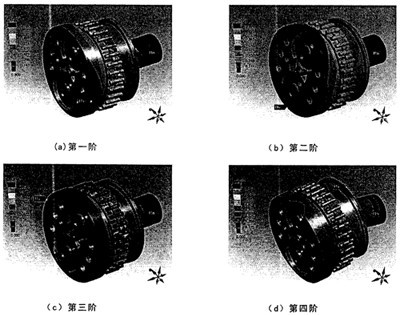
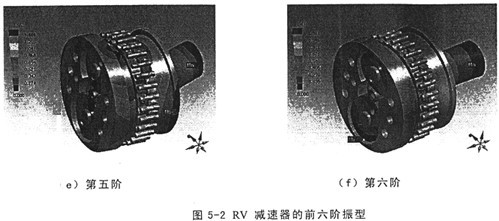
���ψD����Ԫģ���M��ģ�BӋ��r�������ȫ���Ĺ����l�ʺ����ͣ�Խ�ǵ̓rģ�B�������Ӱ�Խ��ͨ��ȡǰ5��10�Aģ�B�����Ⱦ�������n�}�ڷ����������ǰ11�Aģ�B���@Щģ�B�Ĺ��l�ʺ�������rҊ��5-1���D5-2�H�o���p������ǰ6�A�������ͣ�ͨ�^���͈D���A���͵ĄӮ��@ʾ����ֱ�^�ط���RV�p�����ĄӑB���ԡ�
|
ģ�B�A�� |
�����l�ʣ�Hz) |
���� |
|
1 |
836.42 |
ݔ���Sˮƽ�[�� |
|
2 |
841.39 |
ݔ���S��ֱ�[�� |
|
3 |
1300.58 |
���ԱP��ݔ���PŤ�D���[��݆Ť�D |
|
4 |
4164.25 |
ݔ���S��ֱ���� |
|
5 |
4403.56 |
ݔ���Sˮƽ���� |
|
6 |
4882.55 |
ݔ���S�S����s |
|
7 |
8323.59 |
ݔ���S�c�u�_���X݆ˮƽ�[�� |
|
8 |
9240.31 |
�u�_���X݆�������S���[��݆Ť�D |
|
9 |
9947.73 |
�u�_���X݆�c�����S�[�� |
|
10 |
10112.03 |
���ԱP�cݔ���P��Û |
|
11 |
10159.04 |
�u�_���X݆�c�����S�[�� |
��5-1 RV�p�����Ĺ����l�ʼ����ͱ�
��RV�p������ؓ�d׃�����`���^С����r�£��伤����LJ��τ��ȵ�׃���l�ʡ�RV�p�����ć��τ����ɝu�_���X݆���Ӈ��τ��Ⱥ͔[���݆���Ӈ��τ��ȽM�϶��ɣ�ԓϵ�y���\�����ڑ����������ăɷN���τ���׃�����ڵ���С�����������ڏ�ݔ���X݆�S���[��݆�Ĝp�ٱȺܴ��є[���݆���τ���׃�������������\�����ڣ���׃�����l�ʞ�
f2=n2����Zb-1��/60 ��5-7��
ʽ�У�n2�ǵڶ����p�ٲ��ֵ�ݔ���D�١����~�����r�£�ݔ���S�D�ٞ�1500r/min���tn2�s��435r/min���@�ӵ�f2=210.25Hz����5-1���l�F�����h���ڼ����l�ʣ����RV�p���������ˮƽ�ܵͣ��@Ҳ��RV�p����Խ��Խ�V���ؑ����ڙC���˵�һ���dz���Ҫ��ԭ��