�p����Uʽ�f���S���Ą�������
5.1����
�κΙCе�����\�ӣ��κΙCе���ܵ��������ã����N�Cе���ܵ��������ö��\�ӣ����\�����֕��a�������������������\�ӵ��Ӱ푣���ʹ�����W���}�ஔ�ď��s���@һ�c�ڿ��g�C�����w�F����ͻ������ǰ��ķ�����֪������Uʽ�f���S���C����һ�N�\��Ҏ�ɷdz����s�Ŀ��g�C�������Ą���������Ȼʮ�֏��s�������ֹ�ȥӋ��������ܡ�
�����������M�ЙCе�OӋ�Ļ��A��ֻ��ͨ�^��������֪�����w��������r���ſ��ڙCе�OӋ�Ќ����w�M�Џ��ȡ����ȡ�ƣ�ڡ������șCе�����M��Ӌ�㡣�ɴˣ�������������Ҫ�Կ�Ҋһ�ߡ�
���ڄ����W�о��ď��s�ԣ��˂���������һЩ�ٶ���ʹ���}�������Еr�@�N�ٶ��o�P�oҪ���Еr�t������Ӌ���ʧ�`�����S�����a���`�İlչ���������W�����Ĝʴ_��������µ�Ҫ��������f�����o�B����ӑB���o���W�����ͺ㶨�ӑB����׃�ӄӑB�ĄӑB�o���W�������t�������ܝM�������Ҫ��˱���M�������Ą����W�������Ԅ����W������
���W��Փ�İlչ�����Ӌ��C�ĸ��M�͏V�����Þ�����W���������ṩ����Փ���A�͌��`�ֶΡ�Ŀǰ�ڱ����CAD��CAEܛ���У�ADAMS�����^�����\�ӌW�������W���������ڱ�����I����@���ˏV���đ��ã����������^�õĽ�Q�����Ą����W���}��
��������ADAMSܛ�������������н������p����U�f���S���M�ж����w�Ą����������õ���һЩ���õġ���ҕ���ĽY����
5.2��Փ����
5.2.1�C����W����
�Cе�����W�о��Cе���������µ��\�Ӻ����\���Юa�����ĿƌW�����ڙCе�aƷ�ĸ��ٻ������ܻ����p���������ʻ��İlչڅ���ʹ�Cе�����W�İlչ��Ҫ����������_�����挍�ķ�ӳ���^���H�Ą����W��������������ǰ��Ӌ���е��S����O�ͺ�����
�ڙCе�����W�lչ���^���Юa���������ķN����������
�o���W������Static Analysis�������ڵ��ٙCе�����\���еđT�������Ժ��Բ�Ӌ���ڙCе�\���^���еĸ���λ�ò����o��ƽ��ķ�����⣻
�ӑB�o���W������Kineto-Static Analysis�����S���Cе���ٶȵ���ߣ��T���������ٱ����ԡ��ٶ������������Ҏ���\�ӣ������_��ؐ��ԭ����⣻
�����W������Dynalnic Analysis���������ڸ��N���������£��Cе�����ܾS��������\��Ҏ���@һ�ٶ����ڷ����У���ԭ��Ҏ�����ڙCеϵ�y֮�ȁ��M�з�����
���Ԅ����W������Elasto-dynamics Analysis������ǰ���N���������У����������ٶ��鄂�Եģ����S���Cе�p�����İlչ���������ԼӴ��\�D�ٶ���ߣ��T�Լ����������@�N��r�£������ď���׃�Ε��o�Cе�\�ӵ�ݔ�������`�
�Cе���Ԅ����W�ǙCе�����W�lչ�����A�Σ����о��љCе�Ę��������Ǐ��ԵĶ����DŽ��ԕr�ęCе�\�Ӡ�B���Լ������Ə��Ԅ���푑�����ȡ�Ĵ�ʩ�������ęCе�OӋ������Ŀǰ�@�N�����ѵõ��ˏV���đ��á�
5.2.2ADAMS�еĄ����W����
ADAMS�в����������ճ��ӷ�����ϵ�y��������
�����s������

��q��t��=0
�������s�����̦�(q��

��t)=0
����
T����ϵ�y���ܣ�
q����ϵ�y�V�x������ꇣ�

�����V�x����ꇣ�
p���������������s�������ϳ�����ꇣ�
�̡��������ڷ������s�������ϳ�����ꇣ�
ͨ�^�����ַ��̵Ĕ�ֵ�⣬���ɵõ��Y����
5.3�p����Uʽ�f���S���Ą�������
5.3.1����ģ�͵Ľ���
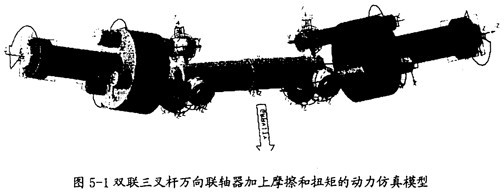
������ģ�����ڵ������е��\�ӷ���ģ�ͣ��D4-18���Ļ��A��ͨ�^��ȥ�\���ӣ�����������Ħ�������õ��D5-1��ʾ�Ą�������ģ�͡�
Ŀǰ������Uʽ�f���S�������������棬���l����Փ�Ĵ�����ں���Ħ�����c�T�����ėl�����M�еģ��H��������A���o���W���������ǿ��]���㶨Ħ���͑T�����ĄӑB�o���W���������ڌ��H�����У�Ħ�����H���S�����HʧЧ����Ҫԭ��֮һ��������Ӱ�Ч�ʵ���Ҫ���أ��������S�������\�D�БT�����Dz��ɺ��Ե���Ҫ���ء���˱����ڿ��]��Ħ���͑T��������r�£��M�������Ą����W�����������wϵ�y�����ض����ó�ȫ�µĽY�������@�N�S�����Mһ���о����_�l���»��A��
5.3.1.1����ģ�͵ĵ��P�I�c
5.3.1.1.1Ħ������ʩ��
���p����Uʽ�f���S����ģ���У���\�ӵĘ����^�࣬��������֮�g�Ļ�ӽ��|�涼���a��Ħ���������ã���ͬ���\�Ӹ���ʽ��Ħ���a���ā�ԴҲ��һ�ӣ���ʩ��Ħ���rҪ������ͬ��Ħ����Դ���]�����ص�Ӱ푡��ڱ��µķ����У������\�Ӹ��g����������Ħ�����������漰���������ķN�\�Ӹ����F������Ħ����ʩ�ӵĿ��]���������µ������
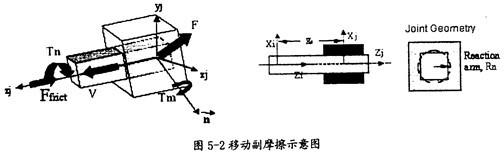
�ƄӸ���
�ƄӸ��a��Ħ����ʾ��D��D5-2��ʾ�����@�N�\�Ӹ���ֻ���a���������Ƅӷ���v����D5-2���{ɫ���^��ʾ����Ħ����Ffrict����D5-2�мtɫ���^��ʾ��,���Įa����Ҫ�����N���أ��������g����õď�����F�������g����õ�Ť��Tn�������g����õď���Tm���@���N����D5-2�оGɫ���^��ʾ������ʩ�����@Щ�������a����Ħ�����r��Ҫ���]������F�Ĵ�С����Ч���ñ��LRn����D5-2����߅�D��ʾ�\�Ӹ��g���دB�����دB����׃����r��Ť��Tn�Ĵ�С�����ĵ�Ч�����ñ��LRn������Tm�Ĵ�С�͏��صķ����ñ��LXS����D5-2���g�D��ʾ��������߀�ÿ��]�oĦ��ϵ������Ħ��ϵ�����A�d�ɵ����á�
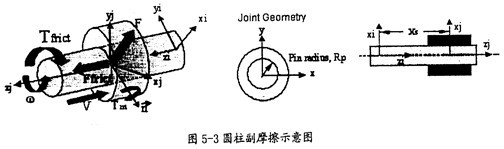
�A������
�A�����a��Ħ����ʾ��D5-3��ʾ�����@�N�ӄӸ��Е��a���������Ƅӷ�V����D5-3���{ɫ���^��ʾ����Ħ����Ffrict����D5-3�мtɫ���^��ʾ�������������D����أ���D5-3���{ɫ���^��ʾ����Ħ��Ť��Ffrict����D5-3�мtɫ���^��ʾ�������Įa����Ҫ�ɃɷN���أ��������g����õď�����F�������g����õď���Tm���@�ɷN����D5-3�оGɫ���^��ʾ������ʩ���@Щ�������a����Ħ�����r��Ҫ���]������F�Ĵ�С���A���돽RP����D5-3���g�D��ʾ�����\�Ӹ��g���دB�����دB����׃����r������Tm�Ĵ�С�͏��صķ����ñ��LXs����D5-2���҈D��ʾ��������߀�ÿ��]�oĦ��ϵ������Ħ��ϵ�����A�d�ɵ����á�
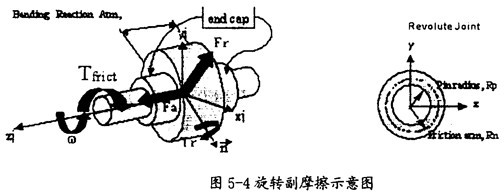
���D����
���D���a��Ħ����ʾ��D��D5-4��ʾ�����@�N�\�Ӹ���ֻ���a�����������D������D5-4���{ɫ���^��ʾ����Ħ��Ť��Tfrict����D5-4�мtɫ���^��ʾ�������Įa����Ҫ�����N���أ��������g����õď�����Fr�������g����õ��S����Fa�������g����õď���Tr���@���N����D5-4�оGɫ���^��ʾ������ʩ�����@Щ�������a����Ħ�����r��Ҫ���]������Fr�Ĵ�С���A���돽RP����D5-4�҈D��ʾ�����S����Fa�Ĵ�С��Ħ���돽Rn�Ĵ�С����D5-4�҈D��ʾ��������Tm�Ĵ�С�͏��صķ����ñ��L�������D�����L�ȣ���D5-4����D��ʾ��������߀�ÿ��]�oĦ��ϵ����Ħ��ϵ�����A�d�ɵ����á�
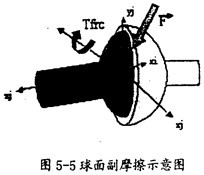
���渱��
���渱�a��Ħ����ʾ��D��D5-5��ʾ�����@�N�\�Ӹ���ֻ���a�����������D�����Ħ��Ť��Tfrc����D5-5�мtɫ���^��ʾ�������Įa��ֻ��һ�N���أ��������g����õď�����F����D5-5�л�ɫ���^��ʾ������ʩ��������õď�����F�a����Ħ�����r��Ҫ���]������F�Ĵ�С����돽������߀�ÿ��]�oĦ��ϵ������Ħ���������A�d�ɵ����á�
���@һ�^���зքe��20���\�Ӹ�������Ħ�������@Щ���ڷ����Ќ����S���������Įa�����ص�׃����׃�����@�ں���ĽY���п���Ҋ����
5.3.1.1.2������ʩ��
�ڄ��������У����ַ��̵�����õĶ����Ô�ֵӋ��ķ������ڵ��������^���У����L�����^�L��������L̫�t�ڔ�ֵӋ���Е����Ք������·����ʧ�����ڄ��������У����Ҏ���˕r�g���IJ��L�����������^����������t�ڷ��������w���^�̵ĕr�g�ȕ��l���ܴ�Ŀ��gλ�ƣ����@�N��r�£���ֵӋ�㌢�ܿ��ܲ��Ք��������M�Є��������У�������׃���^��ƽ�����M�У���ֹ���F�����ĬF��
��ADAMS���ṩ���A�ݺ�����STEP�������������������Q�@һ���}�Ĺ��ߡ�STEP�����������£�
��ADAMS�У�STEP��������һ���˜ʵĔ��WSTEP�������]�в��B�m�ԣ�,���ƽ���ֵ�����磺�ӻ����������ϻ������»��ߴ��_���P�]�����ĺ����D����D5-6��ʾ����ʽͬ�������f�����£�
��ʽ��STEP(x,x0,h0,xl,hl)
�����f����
xһ��׃���������Ǖr�g��r�g����һ������
x0һ��׃����STEP�����_ʼֵ�������dz��������_ʽ���OӋ׃����
x1һ��׃����STEP�����Y��ֵ�������dz������������_ʽ���OӋ׃����
h0һSTEP�����ij�ʼֵ�������dz������OӋ׃���������������_ʽ��
h1һSTEP��������Kֵ�������dz������OӋ׃���������������_ʽ��
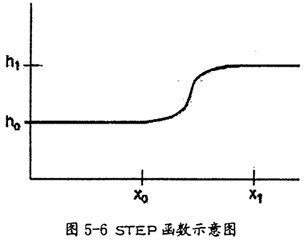
�������f���У�����֪����STEP������ʹ��ֵ֮�g���^��ƽ�����ڱ��η����������������@һ�c����ʩ�������r�����˴˺�����������Oƽ���^�ȵ�һ���^���ֵ��ʹ����ƽ�����M�У������˰lɢ�F��
���@һ�^���зքe��ݔ���S֧ͬ���g�����D����ݔ���S֧ͬ���g�����D����������STEP���������ӣ�ݔ���S֧ͬ���g�����D���ϵ�������ؓ�d��ݔ���S֧ͬ���g�����D���ϵ��������������أ���
5.3.1.2ģ�͵ęz�
������ģ�ͺ�ģ���M�Йz�Y�����£�
ģ���й���15��������
��6���A������2�����D����6�����渱��6���ƄӸ���
ģ����8�����ɶȣ�Gruebler��������ÿ���s�������Ҫ���o���ࣻ�����^���@ʾ�dz���Ҫ������z���������ļs�����t�������^���У�ADAMS����ȥ�@Щ�s��������ȥ�@Щ�s�����ǂ��\�Ӹ����Dz��ɿ��Ƶģ��ǘӵĺ�����ڄ����������еõ����\�Ӹ��ϵķ��������Ͳ����_��ֻ��ͨ�^�������w�Ą��������вſɼ����a�ȡ���ģ���мs�����ßo���࣬�@����ÿ���\�Ӹ������y���ķ������������_�ġ�)
��ģ�͵ăɶ˼��Ѓɂ����أ�-����������������-���t�����������أ�
��ÿ���\�Ӹ��о���Ħ������ʩ��20��Ħ������
5.3.2��������
ͨ�^�O��-���ķ��沽�����x��-�N�m���ڄ���ϵ�y������ֵ׃�����ϵ�y�����ҷe�ַ����Ժõ�����������η����x����MODIFIED������������ADAMS�ṩ��GEAR,DASSL,MODIFIED,ABAM,SI2�@��N������У�GEAR��DASSL��MODIFIED������m���ڄ���ϵ�y���ҷe�ַ����Ե��Pϵ�飺MODIFIED>DASSL>GEAR�������M�Є������棬��ݔ�����y���Y����
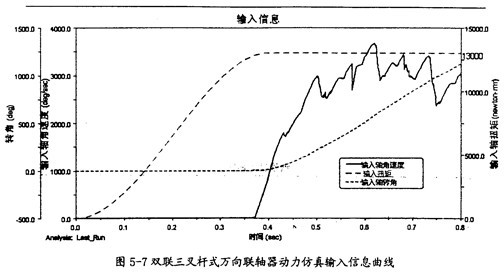
STEP������׃����������D5-7��ʾ����
ݔ���S�D�ǵ�׃����������D5-7��ʾ����
ݔ���S���ٶȵ�׃����������D5-7��ʾ����
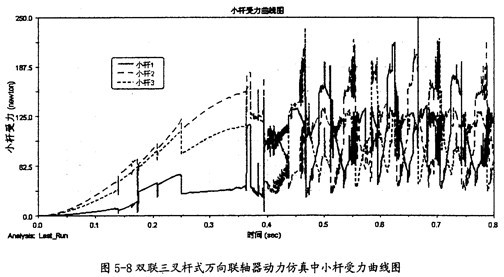
С�U������������D5-8��ʾ����
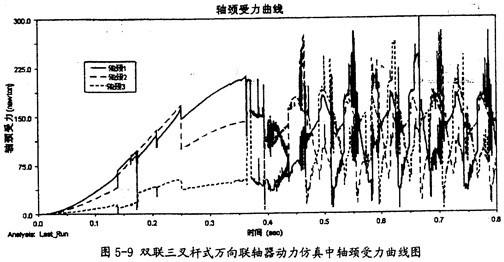
�S�i������������D5-9��ʾ��:
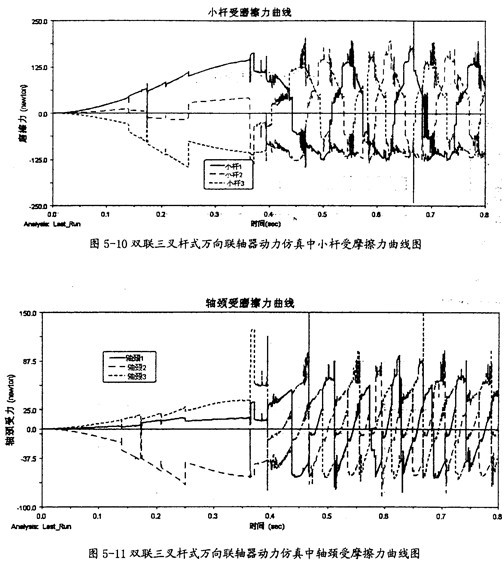
С�U��Ħ������������D5-10��ʾ����
�S�i��Ħ������������D5-11��ʾ����
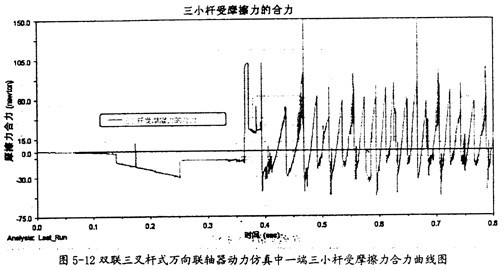
ݔ���S��ݔ���S�ɸ��ӏ��خa����Ħ��Ť�أ���D5-12��ʾ����
�������еĜy���Y��������ͬ-�η����еõ�������v�r0.8�룬�p����Uʽ�f���S���ڷ����н��v�ˏĆ��ӵ�ƽ�����ӵĄӑB�^�̡����������Ĝy�������У�������ͻ׃�F���@-�F�����ͬģ���еĄ��w���O���Լ��oĦ��ϵ������Ħ��ϵ����ͻ׃���P������������w���愂�w����Y����ԓ��ƽ���������ā��f���@���������-���ij̶��Ϸ������@Щ����׃��څ�ݣ�Ҳ������������ą�����
5.4����Y������
�ɈD5-7���Կ������p����U�f���S���ڄ���������^���У�ݔ����������STEP������څ��������˷��oĦ�������_ʼ�D�ӣ��ڽ��ٶ��_��һ����ֵ���F���ӵĬF�tɫ���l��ʾ����������ƽ������Ľ��Ƶ����D�ӡ�
�ɈD5-8���Կ������p����Uʽ�f���S���ڄ���������^���У�һ�˵�����С�U���ƄӸ����ܵ��������ӣ���ϵ�y�_ʼ�D�Ӻ������ܵ������ʬF��Ҏ�ɵIJ��ӣ�������֮�g��һ����λ�������������������׃�ӏ��s���������ڻ��U���S�ϵ����������������;Ϳ��ܲ���0���@�ӵĽY���ǣ���������֮���ڻ��U���S��ݔ���S�����γ�ؓ�dŤ���⣬߀���a�����ӏ��ص����á�
�ɈD5-9���Կ������p����Uʽ�f���S���ڄ���������^���У� �p����Uһ�˵����S�iͬ�����^�ĈA�����ϵ�������׃��څ��ͬ�D5-8�е�С�U׃��څ������ͬ�ġ���������������׃�ӏ��s�����@�������p����Uһ���ϵ�������Ҳ���ܲ���0���@�����p����U��Ҳ���a�����ӏ��ص����á������S�i����ƽ���^С�U������Ҫ��
�ɈD5-10���Կ������p����Uʽ�f���S���ڄ���������^���У���һ�˵���С�Uͬ���U���S�g��Ħ����׃���ஔ��Ҏ�ɡ���С�U�������U���S�\�ӷ���r�������͕�����ؓ�g��Ҏ�ɵ��ГQ��
�ɈD5-11���Կ������pȡ����Uʽ�f���S���ڄ���������^���У���һ�˵��������^ͬ�S�i�g��Ħ����׃���ஔ��Ҏ�ɡ��������^�����S�i�\�ӷ���r���C���͕�����ؓ�g��Ҏ�ɵ��ГQ�������@��a��Ħ������ƽ����СҪ�^С�U�ϵ�С�öࡣ
�ɈD5-12���Կ������p����Uʽ�f���S���ڄ���������^���У���һ�˵�����С�U���ܵ�Ħ�����ĺ���׃���^��Ҏ�ɣ���ֵ���_ʼһ��ƽ����������0�����IJ��ӡ������@����Ħ�����ķ����ƽ����ݔ���S��ݔ���S�S�����ʴ˺�������ݔ���S���S���S�Ϯa���S���������ݔ���S��ݔ���S�Ϯa��Ħ��Ť�ء���ȡ��ˮƽ�^��ֵ60ţ��Ӌ�㣬���a����Ħ��Ť�؞�270N��mm��60��0.3��15=270������0.3���Ħ��ϵ����15��Ħ���돽������ֵ�����D5-13�е�ֵ�����ஔС��
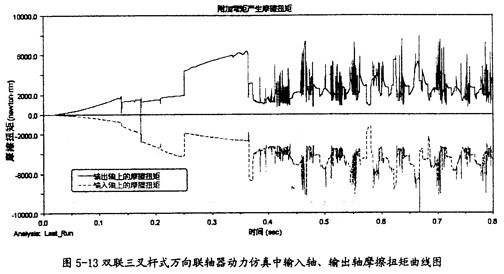
�ɈD5-13���Կ������p����Uʽ�f���S���ڄ���������^���У�ݔ���S��ݔ���S�ϵ�Ħ��Ť����u���ӣ�Ȼ���_ʼһ�N���s�IJ��ӡ����ڱ��η������ڟo�����ĭh�����M�еģ���ˣ��������������������ݔ���S��ݔ���S�Ϯa�����غ�����a���ķ����������γɏ��أ���ȻҲ�͛]���������ö��γɵ�Ħ��Ť�أ��tֻ�п�������С�Uͬ���U���S�g���������������ڻ��U���S�Ϯa�����S�����͏��ض��a����Ħ��Ť�أ����ɈD5-12�ķ�����֪���S�����a����Ħ��Ť�غ�С, �t�����C�����U�������^��ĸ��ӏ��ش��ڣ����������γ�Ħ��Ť�ص���Ҫԭ��
5.5�����Y
�������U���˙Cе�����W�ĎN�������������_�˄�������������څ�ݡ����ڶ����w�����W����Փ���A�ϣ�����Ŀǰ������еĶ��w�����Wܛ��ADAMS,���p����U�f���S���M���˄����Wģ�͵Ľ����̈́������棬�õ����S���ҕ���ĽY�����C���@�N�S���ڂ������������ஔ�ď��s�����ó���һЩ���ԵĽYՓ���@�N�S�����Mһ���о��_�l�����˻��A��