�ɷN�зLjA݆�����ǂ��әC���IJ�ͬ�OӋ
6.1����
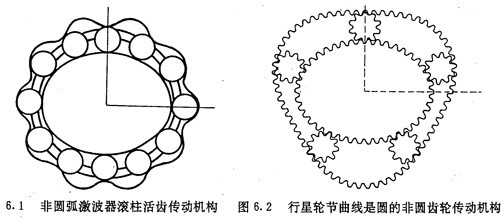
�μ����ƗU�p�����ļ���������һ��ʹ��ƫ�ĈA���༤���ƗU�p�����ļ����������ǷLjA����������ȥ���ƗU������L�Ӻ϶���һ�r���ƗU�p������׃���˝L�����X�p��������D6.1��ʾ��������������������ǷLjA���ǂ��әC�����@��X���әC����˲�r���ӱ��ǂ���������ʽ��2.8����ʾ���@Ҳ���OӋ���X���әC�������ѭ�Ĝʄt���ĺ���ķ�����֪���@�͛Q���˻��X���әC�������ϸ����\�����|���������Ǽ��L�ӡ����Ҫ���ƗU�ɶ˼��b����L�������ӝL�ӳɷݶ��pС���ӳɷݡ����ڝL�����X�p�������f�����L��ͬ�rҪ�c�����������XȦ����|������һ����һ���л��ӡ���������f���X������һ�N���L�\�ӷ�ʽ�ķLjA���ǂ��ӡ������\�Ӹ��ǻ��L�\�ӣ����H�C������ʹ��݆�X�M�Ђ��ӣ����ǿ������ϵăɂ�݆�Ĺ⻬������|��
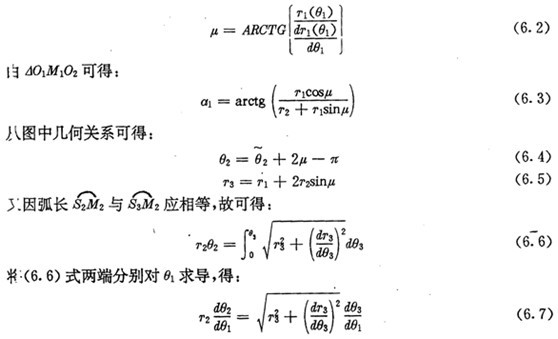
���ȥ��˲�r���ӱȞ鳣���@��ǰ�ᣬ�����\�Ӹ��������L�ӵ��\�ӷ�ʽ�����OӋ�����L�ӵķLjA�����X݆���әC�����D6.2�����ĺ���ķ�����֪���@�N�C��������������݆֮�g�����Ľ���׃���ģ���������݆��̫�݆�����XȦ֮�g�����ݵ���eҲ��׃���ģ������@һ���ԣ�����������ٴ�Ť��Һ���R�_��
�Ľǵ�׃��Ҏ���M���˷�����
6.2������֮�g���Pϵ
�O̫�݆���������̞�T1= T1���ȣ�������݆�������ǰ돽��T2�ĈA�������C�������L�\�ӻ�˲�r���ӱȞ鳣���@�ɷN��ͬ���OӋԭ�t�����OӋ���ɷN��ͬ�ă��XȦ�X��������
6.2.1���L���\�ӷ�ʽ�Ĺ������Pϵ
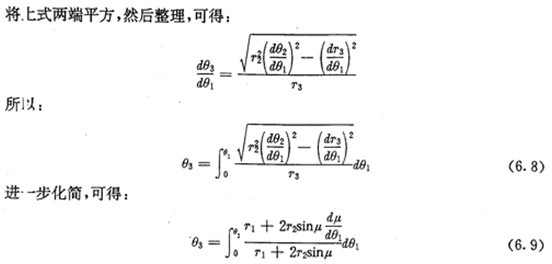
������D6.3��ʾ������ϵ������ʼλ�ã��քe�c̫�݆������݆�Լ����XȦ��������������ϵ�ĘO�Sx
1 ��x
2��x
3��ͬһ�lֱ���ϣ���ָ����ͬ���D6.3��ʾ��̫�݆��������݆�D�^��

�ǵ����Ρ��O�˕r���XȦ����ԓ����݆�D�^�ĽǶȞ�

���������Ķ�������ƽ��ƽ���\�ӵ���������������˲�ı�Ȼλ��ͬһ�lֱ���ϣ������L�Ӹ��Ľ��|�c����������˲�ġ����̫�݆�c����݆�������Ľ��|�cM
1������݆�c���XȦ�������Ľ��|�cM
2�Լ���������O
1�@�����cλ��ͬһ�lֱ���ϡ�����Ǽ��L�ӣ��D6.3�л��L

�c

����ȣ�����ʼλ��S
1�cS
2�غϣ����ɴ˿ɵÈD6.3��

�c��
1�ĺ����Pϵ�顣
�O�̞�̫�݆��������M1�c���о������cʸ��O1M1�ĊA�ǣ����֎�֪��
����6.5��ʽ����6.9��ʽ�������ǃ��XȦ�������ķ��̡�ͬ��������֪���XȦ���������̣����Ͽ����̫�݆��������
6.2.2�����ӱȞ鶨ֵ���OӋ
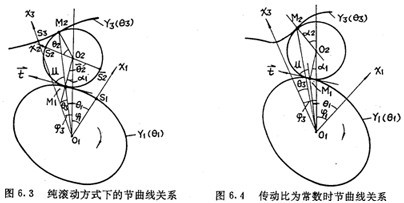
��D6.4��ʾ���O̫�݆��������݆�ij�ʼλ���D�^

�Ǖr�����XȦ����ԓ����݆�����D�^�ĽǶȞ�

����
�c
�ı�ֵ�鳣��i
13���@�r��һ���л��L��ȵ������џo�����C��������|�cM
1��M
2Ҳ�������\�ӵ�˲�ģ�M
1��M
2������O
1��һ����ͬһ�lֱ���ϡ��@���ǝL�����X���ӵĽY����ʽ���OӋ�����c�ڶ����ͬ���F��Ҫ�������£�
�������c�о�������ĊA�Ǧ��Լ�������a1��Ӌ�㶼�c���L�ӄӷ�ʽ����ͬ������
����l1��ʾ����݆�c̫�݆�����ľ�O1O2���t�ɈD6.4�ɵã�
����6.15��ʽ����6.18��ʽ�����ǃ��XȦ���X�����̡����XȦ���X������������݆������������j����
����������XȦ�X�����̵��^�̿��Կ���������Ҏ�����D��
�c
�ı�ֵ�鳣��i
13��ʹ�Ì���̫�݆����һ�D��
��
�������д_����ֵ
=
/i
13��ͬ�r�D6.4������݆������a
2Ҳ�S֮�ɣ�6.12��ʽ�_���������M
1��M
2�cO
1���c�϶�����ʼ�K������ͬһ�lֱ���ϡ����������£�
���O�D6.4��O
1��M
1��M
2���cʼ�K���ܱ�����ͬһֱ���ϣ��t����̫�݆�D��
���D6.4�е�a
2�ɸ����D6.3�е�����݆�D�Ǧ�
2��ã��ɈD�Ў��Pϵ����6.4)ʽ����
a
2=

-a
1-��
2=��-2��-a
1 ��6.19��
��һ���棬����
�c
�ıȵı�ֵ�鳣��i
13��a
2��ֵ���ɣ�6.12��ʽ�_�������^(6.19)ʽ�c��6.12��ʽ��֪��ֻ����a
1=0�Ҧ�=

�r����������һ�µģ��ɣ�6.10��ʽ����6.11��ʽ֪��ֻ����

�r����=
����a
1=0������̫�݆�Ĺ������������ԣ�������һ�܃�ֻ��2n
1���c��n
l��̫�݆�����������ڔ�����
��������c

�������㣬����̫�݆���D��
ֻҪ���nj�����
��ʽ��6.19���cʽ��6.12����ì�ܵģ�Ҳ�����fM
2�c��Ȼ�����cM
1��O
1λ��ͬһֱ���ϡ��@�f�������ӱȞ鳣���r������݆�c̫�݆������݆�c���XȦ���M�ɵăɂ����ϸ������ܶ������L�\�ӣ�һ����һ�����ϸ��л��ӣ�������X���Ӷ��ǻ��L�\�ӡ�
6.3�������ķ��]�l�����ȷ�
���������L�\�ӵķLjA�����X݆���әC����������õĹ������Pϵֻ��һ��Ĺ�ʽ��Ҫ�OӋ�����H�ķLjA�����X݆���әC��߀Ҫ�ܵ��S�����ơ�
6.3.1�������ķ��]�l��
�����܉��B�m�D�ӣ���֪��̫�݆��������Ȼ�����B�m�����]��,T
1(��
1������Ǧ�
1�����ں������O̫�݆һ�D�е����ڔ���n
1����̫�݆��������݆�Ħ�
1= ��
10�D�^һ�����ڕr������

�������ɣ�6.2��ʽ��֪�D��ǰ���ڽ��|�c������ͬ�Ħ�ֵ��������6.4��ʽ���O��
1=��
10�r������݆���D�����Pϵʽ

��6.20��
�t��̫�݆��������݆�D�^һ�����ں����ڦ�ֵ��ͬ������݆�D���Pϵʽ�飺

��6.21��
��ʽ�С���
2��

�քe������݆�D�Ǧ�
2��

��̫�݆�Ħ�
1=��
10�D�^һ�����ں���������ɣ�6.20��ʽ�ͣ�6.21��ʽ��֪��̫�݆�D�^����һ�����У�����݆�D����������
2�c
��ȣ�����
����
2=
��6.22��
�ɴ˿ɵõ��YՓ��̫�݆��������һ�����ڃȵĻ��L�c���XȦ��������һ�����ڃȵĻ��L��ȡ�����XȦ�����ڔ���n2���tn2������n1�����˜pС����݆�ߴ磬��ȡ��С����ֵn1+1������XȦ�����������ڔ����Ķ����ɣ�6.9��ʽ�õ����XȦ�������ķ��]�l���飺
6.3.2��������݆�X�ȷֵ�����
�O�X݆��ģ����m������ʹ̫�݆������݆�����XȦ���еȷֵ�݆�X�������Ĺ�������������ܹ�m�е������������Ϲ�֪����̫�݆�������c���XȦ��������һ�����ڃȵĻ��L��ȣ����҃��XȦ�����ڔ���̫�݆�����ڔ���1�����ԃ��XȦ�����������L��̫�݆���������L�ģ�n1+1��/n1�������ֻҪ̫�݆��������һ�����ڃȵĻ��L�܉��ܹ��ȷ֣����ܱ��C���XȦ�ĵȷ֡�Ҳ�����f���OZ1��̫�݆�X�����tZ1����n1������������̫�݆�c���XȦ��݆�X�ȷ֗l���飺
����ÿ�����ڵĻ��L������ȵģ�̫�݆�������Ŀ��L����n1�����ڵĻ��L֮�ͣ���n1���ԣ�6.24����߅���ɵõȷ֗l������һ�N���_��ʽ��
���ڹ�������A������݆��݆�X�ȷ֗l���飺
2T2=mZ2 ��6.26��
��ʽ��z2������݆���X�����@Ȼ���XȦ�X��z3�飺
6.3.3������l��
�OӋ�ķLjA�����X݆���әC��߀�����C̫�݆�����̎���X��c���XȦ�С��̎���X픲��l����������̫�݆�������ڦ�1=0�r��ȡ�ØOСֵ���t���XȦ�������ĘOСֵ��T1��0��+2T2�������P�ژO�S�Ќ��Q�Ե�̫�݆���������ڦ�1=��/n1�r�ИO�������X픸ߞ�ha���t���l���\�Ӹ���ėl���飺
2T
2+T
1��0��>T
1��

��+2h
a ��6.28��
6.4�������Է���
6.4.1̫�݆�c����݆��ƽ�����ӱ�
�̶����XȦ����̫�݆���c�ij�ʼλ���_ʼ�D�ӵ��c����݆�����ڳ�ʼλ�ý��|�r��̫�݆�D�^��Ȧ���c����݆���D�^��Ȧ��֮��

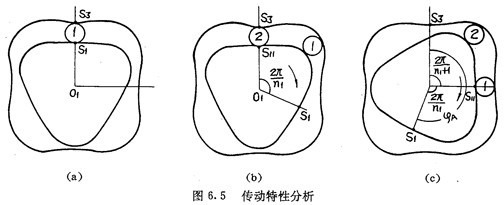
�Q��̫�݆�c����݆�ľ����ӱȡ��D6.5(a�����ʼλ�ã��D6.5(c����̫�݆��형rᘷ�����������݆1�D�^һ�����ں�����Ρ��˕r���XȦ����ԓ����݆Ҳ���D�^һ�����ڣ�������݆1�ij�ʼλ�ù��D�^�ĽǶȞ飺
��̫�݆�������XȦ�D�^�ĽǶ�

�飺
��̫�݆�D��Ȧ��һ�����ڣ�����݆���DһȦ��
6.4.2����݆�Ă���
�O̫�݆���c�ij�ʼλ���������XȦ�D�^һ�����ڣ��ĈD6.5(a���D���D6.5(b��λ�á��ĈD6.5(b����֪���˕r�ڃ�Ȧ�ij�ʼλ��S
3̎�ɷ�����һ������݆���Q����2̖����݆����Ʈ�̫�݆�ij�ʼλ���������XȦ�D�^�ڶ������ڣ���S
3�ɷ����3̖����݆��̫�݆���DһȦ�������n
1+1̖����݆��̫�݆�D��Ȧ�������2n
l+l̖����݆����̫�݆�D��Ȧ��һ�����ڣ�ǡ�õ�1̖����݆�ص�S
3�c�����Կɰ��ŵ�����݆������2n
1+1����
6.4.3����������݆֮�g�����Ľ�
�O̫�݆���c�ij�ʼλ���������XȦ형r��D�^��
�ǣ���
����̫�݆һ�����ڣ�

���r����2̖����݆Ҳ�������XȦ�O�S���D�^��һ���Ƕȣ��D6. 5��C��������

���t

��ʾ�˕r̫�݆�c2̖����݆�ij�ʼ���|�cS
11�������XȦ��ʼλS
3�D�^�ĽǶȡ���
��ʾ1̖����݆�������XȦ��ʼλS
3���D�^�ĽǶȣ��ɈD6.3�ɵã�
������6.33��ʽ�������νo��
�_����̫�݆���cS
1��1̖����݆�c̫�݆�������Ľ��|�cM
1���������ĽǦ�
1��Ȼ����루6.30��ʽ���ɵ�l̖����݆����O
2�c���XȦ��ʼ��S
3���A�����Ľ�
(
)����

���棨6.33��ʽ�е�
������õĦ�
1ֵ���루6.30��ʽ����ɵõ���2̖����݆�����c���XȦS
3�c���A�����Ľ�
(
)��������݆֮�g�����Ľ�

�飺

��6.34��
��Ҋ������݆���A�����Ľ�
��̫�݆�������XȦ�D��
��������S��
ֵ�IJ�ͬ���������Ե�׃���������@

˲�r���ӱ�i
12�飺
i
12Ҳ���S̫�݆�D��
׃���ĺ���������̫�݆�̓��XȦ���ǷLjA�ģ�������������݆֮�g�����Ľ�����׃���ģ����̫�݆�����XȦ�c����������݆֮�g��������eҲ��׃���ģ����������@Щ���ԣ�����������ٴ�Ť��Һ���R�_���՚≺�s�C�șC����
6.5�OӋ���E��Ӌ�㌍��
�F��̫�݆��һ�����D�����ڎ����ĵĘ˜ʙE�A���������f�����L�ӷLjA���m���ӷLjA���ǂ��әC�����OӋ�������E��
�o���X݆ģ��m=2.5,n1=2�����XȦ���ڔ���3 ���OӋ���E���£�
6.5.1�_���X��
̫�݆���X��Z
1�ɸ�����Ҫ���̫�݆�Ĵ�С���_����������n
1���������������xz
1=42���ɣ�6.27��ʽ�����XȦ�X������z
3=63�����˴_��z
2�ĺ��m��ֵ�����Բ����@�ӵķ���������̫�݆�̓��XȦ���˻����X����z
1��z
3�ĈA�X݆���t�˕r������݆�돽

���飺

�r�������������҂��Q��������݆�ą����X�������H���õ�̫�݆�mȻ���˻��ĈA�X݆������ͬ��ģ��m���X��z
1�����������Π�LjA�ģ��@��ʹ�Ì��H���õ�����݆�X��z
2���ȅ����X��
С��̫�݆�������c�A���Խ��z
2����
С��Խ�ࡣ���˜pС݆�X����Ŀ�������z
2Ҫ�M���ӽ�
�������xz
2=10���Ķ���T
2=12.5mm��
6.5.2�_��̫�݆������
��Ҫ��ęE�A��̫�݆���������̿ɱ�ʾ�飺
��ʽ�У�a��E�A���L�S�돽��b��E�A�Ķ��S�돽���ɣ�6.25��ʽ��݆�X�ȷ֗l���飺
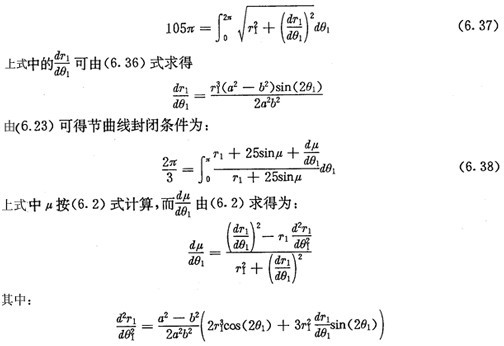
������������Ӌ�㔵ֵ�e�֣��ɣ� 6.37���ͣ�6.38���ɗl��ʽ�M�ɵķ��̽M�ɽ��������a��b�����Y���ǣ�
a=59.7616 mm b=44.6943 mm
ȡh
a=2.5����T
1��0��=44.6943��T
1��
��=59.7616��T
2=12.5���루6.28��ʽ����֪�����l�\�Ӹ��档
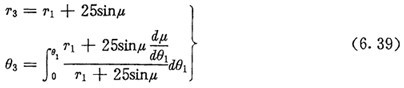
6.5.3�����XȦ������
������6.5��ʽ�ͣ�6.9��ʽ���ɵÃ��XȦ���������̞飺
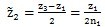
�������Π���D6.6��ʾ���D6.2��ԓ݆ϵ����݆�X������Ρ�����6.34��ʽ���������������݆֮�g�ĊA���S
��׃��Ҏ�ɣ����Pϵ������D6.7��ʾ���������D�ɿ�������

�r���A��

����Сֵ

���A��
��׃��������2.732�㡣
6.5.4�C������
�������OӋ�^�̿��Կ����������LjA̫�݆�OӋ����݆��A�ļ��L�ӷLjA�н��X݆���әC���r�������nj�����ָ����̫�݆���������н⡣��̫�݆�����������ڔ�n1�o������������Ѓɂ����{���ą��������е�a��b����Ҫ�ɹ������ķ��]�l����݆�X�ȷ֗l�����_�����X݆ģ��m��̫�݆�X��z1�DZ��A��ָ���˵ġ��������������Ҫ�ò�����l����6.28��ʽ�M��У���l�����棬���{��z1��ֵ������Ӌ��̫�݆�Ŀ��{��������
�@Ȼ����̫�݆�c�A�IJ�eԽ��r��Խ���װl���\�Ӹ��档Һ���R�_���՚≺���C�șC����������������������݆֮�g�����Ľ�׃�������c����̫�݆�c�A�IJ�eԽ��r������������݆֮�g�A�ǵ�׃������ҲԽ���@��Һ���R�_�șC����Ҫ��ġ�
�

��6.40��

�����˷LjA���ǂ��әC���c�A���ǂ��әC���IJ�e�̶ȣ���
=0�r���LjA���ǂ��әC����׃���ˈA���ǂ��әC����
ԽС��Խ�����װl���\�Ӹ��棬
Խ������������݆֮�g���Ľ�׃���ķ���ҲԽ����6.1���o�������X݆ģ��m��ͬ����r�£��E�A��̫�݆ȡ��ͬ���X��z
1�r���������OӋ���E�õ��ĽY������飺
��6.41��
��6.1 �E�A̫�݆ȡ��ͬ�X���r��Ӌ��Y��
|
m z1 z3 z2 a b ����� |
|
2.5 42 63 10 59.7616 44.6943 ��
2.5 44 66 10 5.4 43.4955 ��
2.5 52 78 12 76.3399 52.5611 ��
|
���Ԯ�z
1���ܱ�2n
1�����r��
�Ͳ����������ɣ�6.41��ʽ�ͣ�6.40��ʽ�ɵã�
���˵õ��C�����l���\�Ӹ���r�����
ֵ������6.42��ʽ�е�С��̖�Q�ɵ�̖������
���룬���ڙE�A��̫�݆���õ������ʽ��
mz2=a-b+2ha ��6.43��
�ģ�6.37������6.38������6.43����ʽ���M�ɵķ��̽M�У����a��b��z
2�����X������( 6.40)��õ��R���l���\�Ӹ���r��
ֵ�����z
2����������m�o��������������ʽ�����M�ɵķ��̽Mһ���ǟo��ġ�����mҲ����һ����׃�����@�r�����н⡣
���M�о��w�C�����OӋ�r���X݆ģ��m����ָ���ġ�������Ҫ���OӋ�ęC���w�e�Ĵ�С������ָ��һ��̫�݆�X��z1��ȡֵ��������������������݆֮�g���Ľ�׃���ķ������郞���OӋĿ�ˣ��������OӋ�����������ϲ�����l�������ƣ��t������Ҏ����z1ȡֵ�����ȵõ���ѽY����