���͔[�U�p�������о�
7.1����
�[�U�p������һ�N�½�����Ļ��X�p�����Y����ͣ���������Ȧ�����Ƅӵ��ƗU׃�����@�̶��S�N�[�ӵĔ[�U��ʹ�p�����и��\�Ӹ��������\�Ӷ��ɞ��D�ӣ��ĸ����Ͻ�Q�ˬF���ƗU�p�����ƄӸ�����ĥ�p�Ć��}���ͬF�е��ƗU�p������L�����X�p������ȣ��ڱ���ԭ�Ѓ�(y��u)�c�Ļ��A�ϣ�ʹ����Ч�ʵõ����Mһ����ߣ��ǻ��X�p�������^�����һ�N�Y����ʽ��
�īIֻ����˔[�U���X���ӵ�һ��Y��������Ҫ���@�N����׃?y��u)錍�H�aƷ��߀���S����Փ���}��Ҫ��Q�����猦�C���������Եķ�����Ч��Ӌ�㣬����У�ˣ��Լ����XȦ�X���Ĝy���ȵȡ����Ĕ[�U�p�����Ă���ԭ�����֣����@Щ���}�M����Ԕ���ķ���ӑՓ����[�U�p����������춨����Փ���A��
7.2 �Y���M�ɼ��X������ʽ
7.2.1�Y���M��
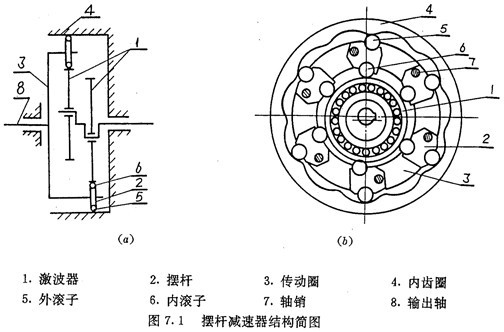
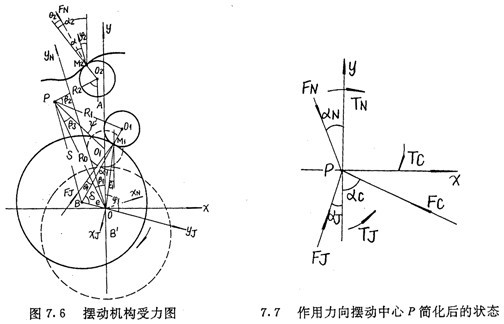
�D7.1��ʾ��[�U�p�����ĽY�����D���[�U�p����Ҳ���ĴֽM�ɣ�������1���[�әC���������[�U2���ȝL��6, ��L��5���S�N7)������Ȧ3 �Լ��c�����ݔ���S8�����XȦ4�����Կ��������˔[�әC���⣬���������c�ƗU�p������ơ�Ҳ�����˃�����ȫ��ͬ�һ���180��ļ����������XȦ�Ԍ��Fݔ�����oƽ�����߇���Ч�ʡ�
�����У��[�U�ȝL��6�ܵ��������ӣ�����L��5 �t�c���XȦ���ϣ��[�U�@�S�N7�[�ӵ�ͬ�r������Ȧ��ݔ���S�D�ӣ��Ķ�������D�ٵ�׃�Q�����ʵĂ��f��
�[�U�p������˲�r���ӱȞ鳣��������ӱ�Ӌ����ȫ�c�ƗU�p�������ӱȵ�Ӌ�㹫ʽ��ͬ��
7.2.2�������D���c�[�U�[�ӽǵ��Pϵ
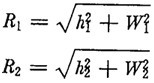
�D7.2��a����ʾ�鼤�����c�[�әC����̎�ij�ʼλ�ã��˕r�[�U�ȝL���cƫ�ĈA�������Ķ��S���c���н��|��O�Ǽ������Ļ��D���ģ�P�ǔ[�U�Ĕ[�����ģ�O
1��O
2�քe�ǃ���L�����ġ�ӛR
0=

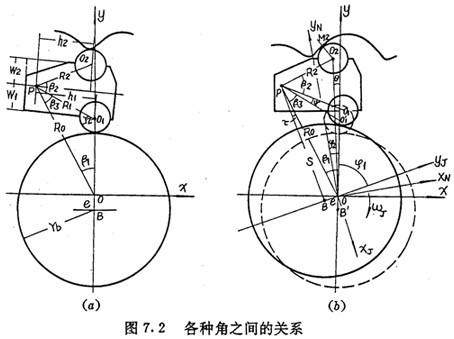
��R
1=

��R
2=

���t�����ڙC���D���^���ж��Dz�׃�ij��������ң�
��ʽ��h1��h2��W1��W2���ǔ[�������c����L����������λ�õą�����Ҋ�D7.2��a����
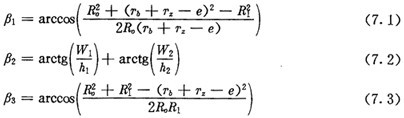
����ӛ�������돽��Tb��������ƫ�ľ���e���L�Ӱ돽��Tz���t�ɈD7.2��a���ɵã�
�������ʽ���Կ�������1����2����3���ǃH�͙C���ߴ煢�����P���c�D�ǟo�P�ij�����
���O����Ȧ�̶������������������������ĈD7.2��a����ʾ��ʼλ�ð�형rᘷ����D�^

�Ǖr���������c�[�әC������λ����D7.2(b����ʾ���[������P�c�ڹ̶�����ϵ��o��x��y���е�λ�ò�׃�����[�U�����ؔ[�^�˽Ƕ�

���ɈD7.2(b)�С�BO
1P�ɵ�
�c

���Pϵʽ�飺
��ʽ�У�S��P�c��������������B�c�ľ��x��
����������ǣ���D7.2��b����ʾ����������������B�c�c�ȝL������O1�c�քeλ��ֱ��OP�ɂȕr����>0��λ��ͬ�ȕr����<0
7.2.3���XȦ���X������
��D7.2(b����ʾ���O�ڼ�������������Ȧ형r��D�^
�ǵ�ͬ�r�����XȦ��������Ȧ��r��D�^�ĽǶȞ�

����������f��

����p��ʾ���������D����O���[�U��L������O
2�ľ��x���ɈD7.2(b���С�00
2P�ɵã�
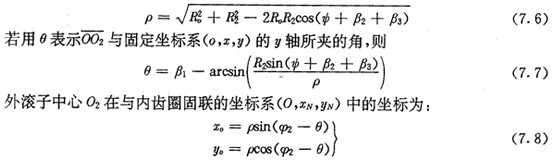
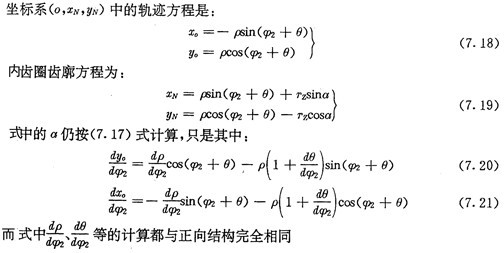
���XȦ�X������L������܉�E���ⷨ��Ⱦྀ����D7.3��ʾ���ɈD�ɵÃ��XȦ�X���c��L�ӽ��|�cM2�ڣ�o��xN��yN������ϵ�µĵ����˞飺
��ʽ�У�a����XȦ�X����M2�c�ķ����cyN�S�ĊA�ǣ���������L������܉�E��O2�c���о������cxN�S����ĊA�ǣ��D7.3��
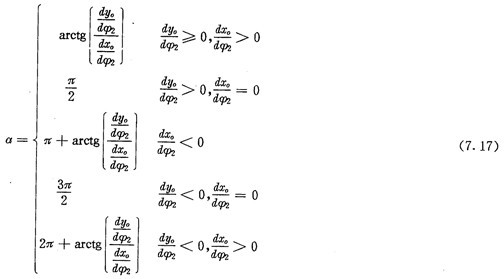
���M�о��wӋ��r���ɣ�7.10��ʽ��ʾ��aȡֵ������[-

]֮�ȣ�ֻ��ʹ�����X��������һ�����ɷ���ʽ��7.9�����_��ʾ������ʹ�X�������е��c�����÷���ʽ��7.9�������_Ӌ�㣬a�ı�ʾʽ���飺
������������rᘷ����D�ӕr����형rᘷ����D�ӕr�Ĺ����X�����˷ǹ����X�����ǹ����X�����˹����X�������ڹ����X���ͷǹ����X���Dz����Q�ģ����������D����������형rᘻ���rᘷ������D��������Ҳ�Dz�ͬ�ġ�
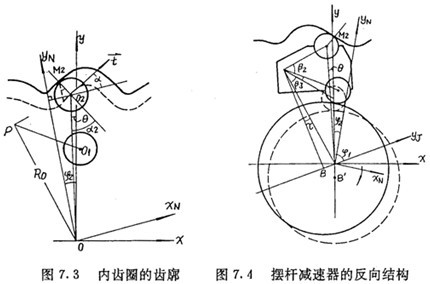
���ƗU�p����һ�ӣ�����Փ�[�әC����Ŀ�ȃ��XȦ�X���٣���ZC=ZN-1�r���C���ɞ�D7.4��ʾ�ķ���Y�����ڴ˽Y���У��[�U��L���������c���XȦ����
7.3�������Է���
7.3.1�[�U�[�ӵķ���
�ɈD7.2��֪�����������D��

�r���[�U̎����ʼλ�ã����[�ӽǶ�

���˕r���������D����O���ȝL������O
1�ľ��x

�飺
���������ĈD7.2��a����ʾ��ʼλ��형r��D�^һ���Ƕ�
�r��

���L��Ҳ�S֮�l(f��)��׃���������D7.2��a����֪����

�r���[�U�[�ӽ�
ȡ�ØO��ֵ

���˕r�����Ҷ����ɵõ���
���Ͽ�֪��

��

�ǃH�c�C���M�ɳߴ煢�����P���������������D��
��

�^�m(x��)���D�r��
���S֮��
�pС�����[�әC����Ȼؔ[���Ķ����һ�����͔[�ӡ��ɔ[�әC�����\�����|�Q�����c��L���ܗ�ă��XȦ�Ĺ����X�����ǹ����X���Dz����Q�ġ�
7.3.2���l(f��)����еėl��
�Ok2����L������܉�E�������������ʣ�����7.8��ʽ�е�xo��yo���루2.23��ʽ����������ɵ�
���ڃ��XȦ�X���������X�̎�����ʰ돽��С�����Ԯ���L������܉�E�������X�̎�����ʰ돽С����L�Ӱ돽Tz�r���X���������X픸������l(f��)����У��ɴ˿ɵò��l(f��)����еėl����

��7.30��
7.3.3ͬ�r�����Ĕ[�әC����Ŀ
�c�ƗU�p������ƣ��[�U�p�����Ĕ[�әC��ֻ�Џă�����[�ӕr�ł��f�������є[�әC���ć��ς����_ʼ�����ς����Y���Ƅӂ���Ȧ�������XȦ�D�^�ĽǶȽ����[�әC�������^(q��)��ǣ�ӛ��

���ɱ�ʾ��

��7.31)
�[�әC�����һ�ι���ѭ�h(hu��n)�S����Ȧ�������XȦ�D�^�ĽǶȞ�[�әC�������^(q��)����c�ǹ����^(q��)���֮�ͣ������ڃ��XȦ�����ɂ��X�����������Ľǣ�ӛ��

����

��ʾ����Ȧ�������ɂ��[�����ģ����N�����A�����Ľǣ��t

�c

֮���w�F�������ɔ[�әC���������� ���ϳ�ʼλ�õIJ���Ķ���ͬ�r�����Ĕ[�әC����Ŀn
g�飺
n
g=

��7.32��
���[�U�p������Փ�[�әC����Zc�c���XȦ�X�����PϵʽZc=ZN��1���t��
ͬ�r�����[�әC����Ŀ��
n
g=

��7.33��
��ǰ��ӑՓ���ƗU�p�����У��ƗU�Ĺ����^(q��)��Ǽ��ǹ����^(q��)�������ȵģ��ڃȔ�Ȧ�X���Ȳ��M�������֟o��е���Փ��r�£������ƗU�����ƗU������һ�롣���ڔ[�U�p�����У��[�әC���Ĺ����^(q��)����c�ǹ����^(q��)��Dz�����ȣ��乤���^(q��)�������ʽ��7.31����ʽ��7.24���_���������ʹ�ڃ��XȦ�X���Ȳ��M�������֟o��У�����Փ��r�£������[�әC����ĿҲ�����ǔ[�әC��������һ�롣�����������D��IJ�ͬ�������[�әC����Ŀ���ܕ����^������һ�룬Ҳ���ܕ����ڿ�����һ�롣
[����]
�o���[�U�p���������Ѕ�����
Tb=55mm e=5mm Ro=87mm Tz=10mm ZN=11
ZC=12 W1=W2=18mm h1=20mm h2=25mm
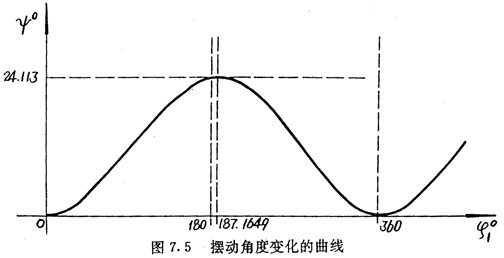
��������ʽ�õ��X��������D7.1��b����ʾ���[��
�S�������D��
׃����������D7.5��ʾ��
��ʽ��7.23��Ӌ��õ�

����ʽ��7.24��Ӌ��õ�

����ʽ��7.33��Ӌ���n
g=6.24
�����C�����DӋ�㣬�ɵã�

��

, n
g=5.76
7.4Ч��Ӌ��
7.4.1�[�әC����������
�̶�����Ȧ����������C������������형rᘷ����D�^
�Ǖr�����XȦ����rᘷ����D��

�ǣ���D7.6��ʾ���ȝL���c���������|�cM
1̎�ķ����c�̼�����ϵ��o��x��y����y�S�A��a
1�飺
�[�әC����L���c���XȦ�X�����|�cM2̎�ķ����c�̶�����ϵ��o��x��y����y�S�A��a2�飺
a
2=a+
��ʽ��a�ı��_ʽ�飨7.17��ʽ��
�O��1�ǃȝL���c������֮�g��Ħ���ǣ��t���������ȝL�ӵ�ȫ����FJ�c�̼�����ϵ��o��x��y����y�S�A��aJ�飺
aJ=a1+��1 ��7.37��
T
J=F
J 
sin����PM
1O
1+��
2�� ��7.41��
�O��2����L���c���XȦ֮�g��Ħ���ǣ��t���XȦ����L�ӵ�ȫ����FN�c�̶�����ϵ��o��x��y����y�S�A��aN�飺
aN=a2-��2 ��7.42��
��F
N�c

�ĊA�Ǟ��PM
2O
2-��
2�ɡ�PM
2O
2�ɵã�
�Of3��[�әC���S�N�c�S�н��|��֮�g��Ħ��ϵ��������Ħ���W��Ħ���A�ĸ����֪��Ħ���A�돽Pr��
Pr=fvTP ��7.47��
����TP���S�N�돽��fv�鮔��Ħ��ϵ����һ���Ɍ�������ijЩ���O�I(y��)�_��fv�Ľ���ֵ�����ڽ��|�潛�^��ĥ���N���Ǻ��^�õ��ܺ��S�i��ȡfv=1.27f3.
�����ԑT������Ӱ푣�����Ȧ���[�әC���Ŀ�����FC��ԓ���S�i�D�ӷ�������Ħ���A���@ȻFC��P�c��Ť��TC��형rᘷ���ֵ�飺
TC=1.27f3TPFC ��7.48��
�OFC�c�̶�����ϵ��y�S�ĊA�Ǟ�ac������FJ��FN��FC����P�c�����[�әC��������B(t��i)��D7.7��ʾ��
�ں��ԑT����Ӱ푵���r�£����г���ƽ�ⷽ��ʽ�飺
7.4.2Ч��Ӌ��
�ڷ��̽M����7.49���У����������D��
�_����F
J��F
N��F
C��a
C�⣬����������������ǰ����ʽ���˴_���Ĕ�ֵ������Ħ���Ǧ�
1����
2��Ħ��ϵ��f
3��ȡֵ�����x�õIJ��ϼ�������r�Q��������F
J�ɸ���ݔ�빦���������������δ֪����F
N��F
C��a
C�ķ��̽M��7.49���ĺ��ʽ����ȥFN���ɵã�
�ķ��̽M��7.49����ǰ��ʽ����ȥFN����������ʽ���е�FC�ã�7.50��ʽ���룬�ɵã�
��ʽ�[���ر��_��a
c�c�D��
���Pϵ������ɏķ���ʽ��7.51���н��a
c����a
c��ȡֵ������0���С��������a
c���ڦ�/2�r�������D7.7��F
e�ķ����P�c���Ϸ�ָ��P�c��
�����ȁ��M�І��[�әC��Ч�ʵ�Ӌ�㣺
���æ�J��ʾ�������D�٣��t�ӹ���P1�ɱ�ʾ�飺
P1=FJ��JLMIsin��aJ-��1�� ��7.52��
��ʽ�е�LMI��ʾ�������c�ȝL�ӵĽ��|�cM1�x�D������O�ľ��x���ɏĈD7.6
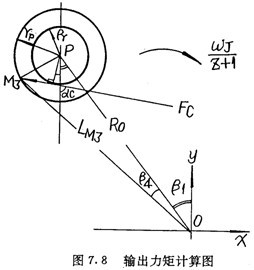
��ʽ��LM3�����Ȧ���әC����������FC�������cM3�x�D������O�ľ��x����D7.8��ʾ���ĈD�С�OM3P�ɵã�
�����ف���C�������w����Ч�ʣ�
ͬ�ƗU�p������ƣ����������������[�әC����������Ҳ�ɽ��ƿ��������ҷֲ���������������i��̎�ڹ�����B(t��i)�Ĕ[�әC���ȝL�ӵ�������FJi�c���������ڔ[�әC���ȝL���ϵ����������FJM���Pϵ�飺
FJi=FJMsin��i ��7.59��
��ʽ�еĦ�
i��ʽ��7.35��Ӌ�㣬�c��������λ�ý�

Ҳ���Ç��϶�λ��

��ʾ�飺
��ݔ��Ť�ص��ڌ��������[�әC����������֮�ͣ����]�����H�b�Þ��p�ŽY����ݔ�빦��P1�ɱ�ʾ�飺
P
1=

��7.61��
��ݔ��Ť�ص��ڸ������[�әC��ݔ��Ť��֮�ͣ�����ݔ������P2��һ��ʾ�飺
�����C�������XȦ�̶�������Ȧݔ�����ć���Ч�ʞ飺
����ƗU�p��������Ч�ʵ�Ӌ�㣬�����϶�λ��

����ȡֵ������ȡ�����c�M��Ӌ�㣬Ȼ��ȡ��ƽ��ֵ����C���Ŀ�ƽ��Ч�ʦ�
P����ȡ���c����20�r��
7.5������
�����[�U�p�����Y���ϵ����c������Ӌ�㑪�����ڼ������c�ȝL��֮�g�����XȦ�c��L��֮�g�Ľ��|����Ӌ�㣬�Լ��[���S�N�ļ��Џ���Ӌ�㡣
7.5.1�������c�ȝL��֮�g�Ľ��|����
�������c�ȝL��֮�g�Ľ��|�������ɺ�Ɲ������ʽ3.25��Ӌ�㣬ʽ�м������c�ȝL��֮�g�������FJmax�飺
�����϶�λ��

����ȡֵ����������, �������ʽ�����ֵ��
7.5.2���XȦ�c��L��֮�g�Ľ��|����
���XȦ�c��L��֮�g�Ľ��|�������ɺ�Ɲ������ʽ��3.27����Ӌ�㡣
�ķ���ʽ��7.49���ĺ��ʽ����ȥFc���ɵã�
7.5.3�[���S�N���
�����[�U�p�����Y���ϵ����c���[���S�N��Ҫ���M����Џ��ȡ��S�N������������max���С���S�ü�����[��]
��
max=

��7.69��
��ʽ��

���S�N�����ܵ��������
��ʽ���ֵ

�����cʽ��3.31�����ֵ������ͬ��
7.6���XȦ�X���Ĺ�ʽ��
�M�ܔ[�U�p�������XȦ�Ĺ����X���c�ǹ����X���Dz����Q�ģ������cǰ���о��ƗU�p�������XȦ�X����������Ƶķ������Կ��ҳ��[�U�p�������XȦ�X���Ĺ������������M����Փ�L��Ӌ��͌��H�y����
��D7.9��ʾ��AB������һ���X�۵�һ���X����A��B���ǿ�̞�K���D��K=5)��һ���X�۵���һ���X�����O���XȦ���X�������ڈDʾ����ϵ�¿��÷���ʽ��7.9������ʾ���F�ځ����X��AB���X��A��B���Ͼ��еĹ�������
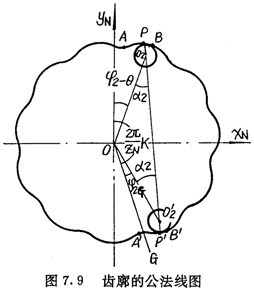
�OP���X��AB�ϵ�һ�c��P�c�������Ĕ[�әC����L�����Ğ�O
2�c���t���X��A��B���Ͽ��܉��ҵ��cP�c�������cP�䣬ʹP������������L������

������O�ľ��x�cO
2������O�ľ��x��ȣ���OO
2=

��
�����X��AB��P�c�c�X��A��B����P���c�й����ķ������tP��O
2��

�Լ�P���@�Ă��c��Ȼλ��ͬһ�lֱ���ϣ���D7.9��ʾ���ĈD�С�O
2
�ɵã�
��O
2
��7.71��
��ʽ�е�a
2����L������܉�E������O
2�c���c�����ĊA�ǣ����ɈD7.3��ã��飺
a
2=a+

��7.72��
��һ���棬�ɈD7.9߀�����
�F���ȁ�����ʽ�е�

��
�ڈD7.2��b���У����Ѽ��������S��y
J���cʸ��OO
1�ĊA��ӛ��

����

=��y
JOO
1���ѹ̶�����ϵy�S�cʸ��OO
1�ĊA��ӛ��

����

=��yOO
1�����t

��7.74��
�ɈD7.2��b���ɵã�
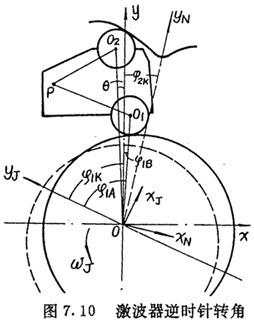
���O�������ĈD7.2��a����ʾ��ʼλ�ð���rᘷ������D��ʹOO
2�c�D7.2��b����OO
2�L����ȵ�λ�ã���D7.10��ʾ���˕r�D7.10�е�OO
1Ҳ���c�D7.2��b���е�OO
1��ȣ��Ķ��D7.10�е�
��
���քe�c�D7.2��b���е�
��
��ȡ��ɈD7.10�ɵü����������D��

�飺

��7.76��
��ʽ��7.74����ʽ��7.76���ɵã�
�Ķ��ɵã�

��7.78��
��ʽ��7.71����ʽ��7.73���ɵ��X��AB���c��۔���K���X�����й��������c�ėl��ʽ�飺
���x�����ⷽ�̣�7.79�����ɵõ��X��AB���c��۔���K���X��A��B����й��������cP����������L��λ�ý�

���Ķ����й������L��W
K�飺
���շ����ƗU�p�������XȦ�X����������Ŀ�ķ������ɵõ���ƵĽYՓ��
��K=INT��

��+1�r��ֻ��һ�l���X����������

λ�ڣ�

���^(q��)�g�y����
��ֵ��
��INT��

����K>K
0�r�����X���������ɗl����������
�[0��

]�^(q��)�g�y����Сֵ����
λ�ڣ�

]�^(q��)�g�y�����ֵ������K
o�ɷ���f��

��=0�����
������ķ������Կ������[�U�p�����c�ƗU�p�������Ծ����Լ��������ԣ�
�ļӹ���ˇ�ρ��������ڔ[�U�p����������Ȧ�ϵĵȷ��S�N�����P�I��ˇ�������ƗU�p�������f������Ȧ�ϵď���ֲ������P�I��ˇ����ԓ�fǰ�ߵĹ�ˇ�Ժ�Щ��
�ć���Ч�ʁ������[�U�p�������D�Ӹ��������ƄӸ�Ч�����Ķ�ʹĥ�p�pС�������ڴ��ʜp���������a��
�[�U�p�������XȦ�X�εăɂ��Dz����Q�ģ��Ķ�ʹ�������D����Ҳ����ͬ��ʹ���ʓpʧ�pС��һ�Ȃ������ܺã�һ�Ȃ������ܲ�������ܺõ�һ���X�Ξ鹤���X�Σ����OӋ���������܃�(y��u)Խ�Ć���p������