����
�������C���OӋ�������ٶ��a���b���Ƿ��_���OӋҪ����������ֶΡ�
�����ƶ��Č���������Cǰ�ĵ���Փ����������Y���͌��YՓ�Ƿ�һ�£��������ݰ������ƽ�_�Ĵ����ϵ�y�ĽY����ԭ��ɲ��֡�
��5.1����
��ԓ�����ٶ��a���b���M�Ќ���о����܉���C�Cеϵ�y������ϵ�y���\���OӋ����Ч�ԣ��l�F�OӋ�д��ڵĆ��}����Փ��ijЩȱ�ݣ���ϵ�y�����ṩ���ָ����
�ڱ����У��Գ���늙C���C���ƵĽ����ŷ�늙C��ԭ�әC���c���������Լ������ٶ��a���b�ÙC���錍��d�w���o�ԙz�yϵ�y�������������ٶ��a���b�õ����ӿ��ƌ��ϵ�y��
5.1.1ԇ�ƽ�_�Ĵ
���ϵ�y���������ٶ��a���b�õęCе������ϵ�y���C������ϵ�y�����Йz�y��ϵ�y�����֡�
ԇ�ƽ�_ģ��ʾ��D�������S�L�Dܛ��Pro��E�L�ơ�
PRo/E��CAD/CAM/CAE�I���һ�����S�D��ܛ�����ڙCе����ӡ����ա����졢�]늡������������ȸ��и��I���Б��á�
PRO/ENGINEERܛ�����ĮaƷ�_�l�h��֧�ֲ��й�������ͨ�^һϵ����ȫ���P��ģ�K�����aƷ�����Ρ��b�估�������ܣ������������Ŀ���b���w���������ܷ��桢���졢���������ȡ�
��D5-1��ʾ�錍�ϵ�y�Cе���ֵ�ģ�͈DƬ�������@ʾ������]��������߅�ęC�䣬�����C������ȫ�_��ʽ�ģ��@��Ҳ���ڌ���^�졣ԓ�Cе�Y�������ɂ��C��֧�Σ���ǰ���ԭ��D��ͬ����߅�C���Ϸ���������܉������δ�@ʾ�ŷ�늙C������߅�C�܄t���ψD��ʾ�������B�U�C������֧�μܡ��S�еȣ�δ�@ʾ����늙C����
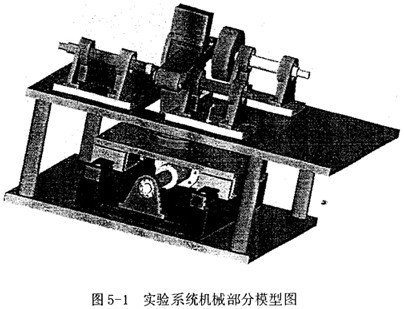
���ڈD5-1��ʾ�C���������ŷ����b�á��������Լ�Ӌ��C����ϵ�y���@��ԓ�����ٶ��a���b�õ�ԭ�ͣ���D5-2��ʾ��
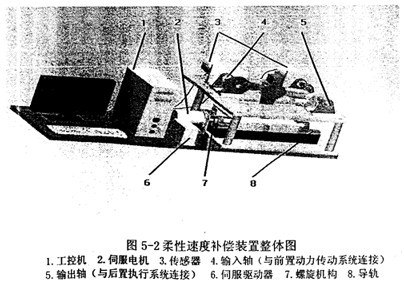
�D�б��^�������@ʾ���������ϵ�y����Ҫ�Ƀɲ��ֽM�ɣ��Cеϵ�y�Ϳ���ϵ�y���Cеϵ�y���ψD5-1��ʾ�����Ʋ�������Ϣ̎��ϵ�y�ֺ͙z�yϵ�y�M�ɡ���Ϣϵ�y�������ؙC���D��1��ʾ�������ɼ���������ģ��ģ�����D�Q���ȣ��D��δ�@ʾ���Լ��ŷ�늙C���D��6��ʾ���z�yϵ�y��Ҫ�ǂ�������������ݔ��ݔ���S���B��
�������ܣ��ֿɌ����ϵ�y���֞��������ϵ�y���ŷ���ϵ�y�������ɶ��B�U�C��ϵ�y���z�yϵ�y���ӿ�Ԫ������Դ��������ϵ�y,���5-1��ʾ��
��5-l���ϵ�y�M��
|
ϵ�y
���Q |
һ����ϵ�y |
���� |
������ϵ�y |
���� |
|
����
�ٶ�
�a��
�b��
����
���
ϵ�y |
�������
ϵ�y |
���w�{�� |
���ؙC |
1.�����㷨�Ĉ���
2.�����ŷ�����
3.�ɼ��z�yԪ����̖
4.����̎�� |
|
���ƹ� |
1.�Դ���ӿھ�·�D��
2.�ŷ�ϵ�y��B��Ϣ�� |
|
�ŷ���
ϵ�y |
�Ӳ�����
�ŷ�늙C
|
�ŷ����� |
1.������λ����ϵ�yָ�����
�����ŷ��R�_
2.���������ϵ�y�����ŷ�
ϵ�y��B��Ϣ�� |
|
�����ŷ��R�_ |
�Ӄ����ɶ��B�U�C�� |
|
��늾��a�� |
�R�_�Sλ�Ùz�y�c���� |
|
�����ɶ��B
�U�C��ϵ�y |
����d�w
|
��һݔ�� |
����늙C���ṩ���\�� |
|
�ڶ�ݔ�� |
�ŷ�늙C�ӣ������C���D
�����D�\�Ӟ������\�� |
|
ݔ���S |
�ĄӼ� |
|
�C�� |
֧�� |
|
�z�yϵ�y |
��B�z�y |
���a�� |
����늙C���ŷ�늙C��ݔ���S�ٶșz�y |
|
�ӿ�Ԫ�� |
ؓ؟�����
��ϵ�y�c��
��ϵ�y֮�g
����Ϣ���Q |
D/A�D�Q�� |
�����ؙC�l���Ĕ���ָ���D
�Q��ģ�M늉�ݔ�����ŷ��
���� |
|
A/D�D�Q��
|
��ģ�M��̖�D�Q�锵������
�����ؙC |
|
|
|
�����ɼ��� |
�ɼ����a���Ĕ��� |
|
��Դ |
��� |
380V��� |
�鹤�ؙC���ŷ��������ṩ�Դ |
|
�Դ׃���� |
��380V�����׃���ŷ��
��������165V����� |
|
ܛ��Labview |
����Ӌ�� |
|
|
�ڌ��ϵ�y�У����ؙC������λ���������ǔ��ֿ��������ŷ�����������λ����������ģ�M����������ˣ��M����һ�������cģ�M��Ͽ��Ƶ��ٶȿ���ϵ�y��
���Ĺ�������飺
1.�A̎�������ؙC����Ӌ������A��ֵ�����{��ȴ棬�����ɘ����������Ӌ�㌢�D�ٺ����xɢ����
2.��ʼ������ʼ�������ɼ���������ģ��ģ�����D�Q���ȡ�
3.���Ƽ��ɼ�����ÿһ�ɘ������_ʼ�r�̣����ؙC�l��늙C�D��һ֬�����ģ�D�Q����D/A׃�Q��ݔ�����ŷ���������ָ����M��Ӌ�����늙C����ÿһ�ɘ������У����ؙC�����βɼ���·��̖���xȡ�@Щ������
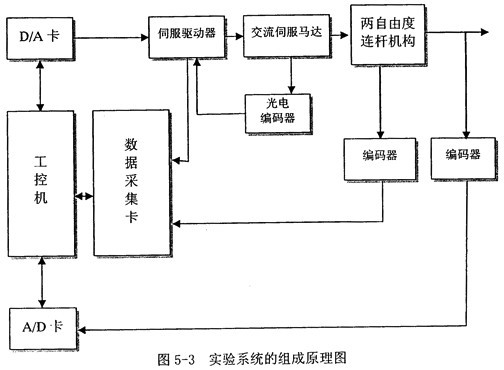
4.����̎����(l���C��늙Cλ����̖����ֵ�����늙C�D�١���2���C�Ô��֞V�������ٶ���̖���V������ֵ�e�ֵ�̎������D5-3��ʾ�錍�ϵ�y�ĽM��ԭ��D��
<, /P>
5.1.2��ϵ�y�ĽY����ԭ��
(l���������ϵ�y
�������ϵ�y�����C�����ƹ�ؓ؟���ϵ�y�Ŀ��w�{���c���ơ�
(2���ŷ���ϵ�y
�ŷ���ϵ�y�����ŷ������������ŷ��R�_����늾��a�����ŷ�늙C��ԓ����ϵ�y���P�I����Ԫ�����ŷ�늙C�ǿ���늙C��һ�N�����Ԅӿ���ϵ�y����һ�С����늙C��������̖�ęz�y��׃�Q�͂��f��������Ԫ������̖Ԫ�����ŷ�늄әC��ݔ���늉���̖׃�Q���D�S�Ľ�λ�ƻ���ٶ�ݔ������׃ݔ��늉���̖����׃���ŷ�늄әC���D�ټ��D������^����ͨ늙C�ŷ�늙C���Ќ��V���{�ٷ������Cе���Ժ��{�����Ծ��龀�ԣ��o���D�F������늉�������r���ŷ�늙C����������ͣ�D��������푑��õ����ԡ�
���^�������^����һЩ�ώ��Ľ��h�������ŷ�늙C�ʂ��x����ͨ늙C��6OCB04OC����̖�ġ�
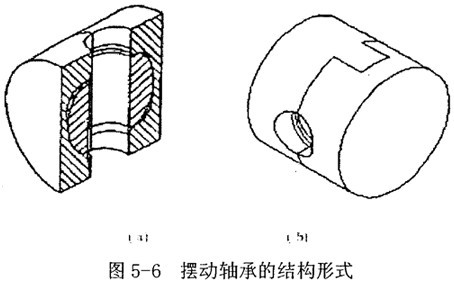
(3�������ɶ��B�U�C��
���Ȍ�ԭ����ԭ��D�D�Q�����µęC���Y���D���H�����D�Q������D5-4����ԭ��2��3����֮�g�ǻ��K���B�U�B�ӣ��F�Ğ��B�U����Ͳ�Ğ��һ���[���S�Y����ԭ�����K3�͵����B�ӣ������γ��^�s�����Ğ��һ���[���S��4���͵��桢��Ͳ���B�ӡ��[���S�Ѓ�о�ஔ��һ�������D�����ı؞��о�����ģ���ȻҲ�������[���S�е����ġ��@�ӱ��ڼӹ���͌�ʩ�����Ҹ���Ҫ���ǿɷ�ֹԭ��ԭ��D�ЗU���B�ӳ��γ��^�s����
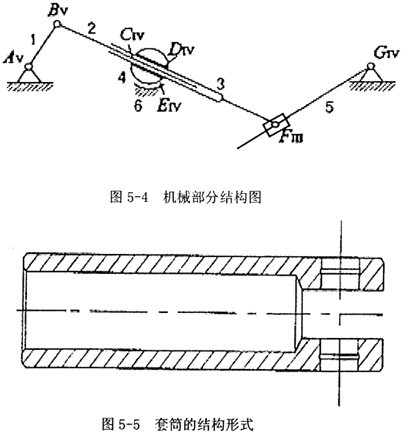
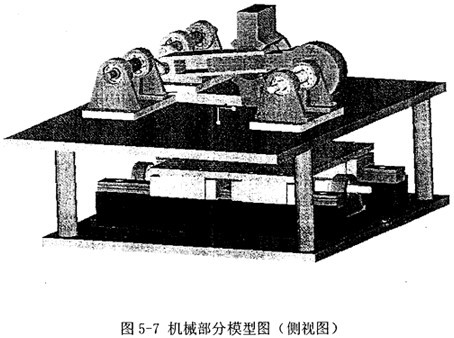
���^�m���ĺ�ģ��C�����и��õ��\�����ԣ��Cе�������wģ����D5-7��ʾ��
��4���z�yԪ��
�z�yϵ�y���C���z�yԪ���ͽӿ�Ԫ���M�ɡ��z�yϵ�y�������ٶ��a���b�����\�Ӆ����M�Йz�y����������ṩ�������z�yԪ���ą����@��]�нo��������S��Ԫ��߀���Ǻܴ_����һЩ����߀���˽⡣
��5.2������
�������C���ƵĽ��L�ŷ�늙C��ԭ�әC֮һ�c���������ԃ����ɶ��B�U�C���錍��d�w���o�ԙz�yϵ�y��������һ�������ٶ��a���b�ÿ��ƵČ��ϵ�y��
ԓ�a�ϵ�y��Ӳ����ܛ���ȷ��������Ԕ�����о�������Ӳ�����棬������һЩ�������ߵ��īI���������]��������ʩ����Ŀ�ˣ����Ԍ��Y���o���������@�DZ��n�}�����z����
