�\�ӌW����
�����У����\�ӌW�Ƕ����ַ��������ٶ��a���b�õ��ٶ�ݔ�����ԣ��������ɶ��B�U�C���ý��������\�ӌW�������ٽ���Matlabܛ��������Ӌ�㡣�\�ӌW�����ĽY����������Ą����W�����ṩ��Փ������
��3.1����
�Cеϵ�y����ҕ�����ɶ�����B�ӡ��˴��܉���\�ӵĘ����ĽM�ϡ�
�ڙCеϵ�y�OӋ����3�N���|��ͬ�ķ�����
(l���Cеϵ�y���\�ӌW����
(2���Cеϵ�y���o���W����
(3���Cеϵ�y�Ą����W����
�ڱ����У��������]ϵ�y���o���W�������ȏ��\�ӌW�������֣��������ٶ��a���b���M�з����о�����Ҫ�漰ϵ�y������������\�ӷ��������c�����\�ӵ����o�P���\�ӌW�����У�ϵ�y��һ�������������λ�û�����λ���c�r�g���Pϵ��Ҏ���õģ�����������λ�á��ٶȺͼ��ٶ��c�r�g���Pϵ������ͨ�^���λ�õķǾ��Է��̽M���ٶȡ����ٶȵķǾ��Է��̽M���_����
������Ҫ���Ĺ������nj���һ���x�����Ķ����ɶ��B�U�C�����M���\�ӌW�����������x���C���ĽY��������������ݔ��ݔ���ٶ��ܷ�M���OӋҪ���Ժ�Ą����W������������
��3.2Mat1abܛ��
������\�ӌW�����У��ж�M���^���s�ķǾ��Է���Ҫ�⣬�@Щ����ͨ�^Matlab�팍�F�ġ�
Mat1abĿǰ�Ǵ�ұ��^���õĹ�����Ĕ��WӋ��ܛ�����������õ��_���Ժ��\�еĿɿ��ԣ��ڔ�ֵӋ�㷽����^�Ѓ��ݡ�
�������õ�Matlab�����^�µ�6.5�汾����һ�N������Ч�ʸߡ������M�пƌW����Ӌ��Ľ���ʽܛ���������а�����һ�㔵ֵ����������\�㡢������̖̎������ģ��ϵ�y���ƺ̓����ȑ��ó����������ó���͈D����ͬһ�h��������ʹ�á��ڴ˭h���£����↖�}��Matlab�Z�Ա�����ʽ���䔵�W��ʽ��ͬ������Ҫ�����y�ķ������̡�
�������ƌW�����߶��ԣ�ʹ��Matlab�Ď캯���Ŀ��Թ�ʡ�ܶ��؏;��̣���ʡ�˴����������������͕r�g���ӿ��˹����M�̺�Ч�ʡ�����Ҫ����Matlabܛ�����́��ⷽ�̡�
��3.3�\�ӌW����
ƽ��C���\�ӷ����Ľ�����Ҳ�ж�N������ʸ�����̽����������^���ڑ��ú;���Ӌ�㡣
���D2-18��ʾ�ęC�����D���������L���\�Ӻ��D������ֱ������ϵ������ʸ�����̽��������ڈD�И�ע���Uʸ������Uʸ�ķ�λ�ǡ�
�������ɶ��B�U�C�����������Ӳ����\�Ӻ��Σ������@����������������Ҫᘌ������6�U�C�����ɵķ��]朣��M�з���Ӌ�㣬����������D3-1��ʾ��
������·1ʸ�����̣�

�� ��1��
ͬ����������·2ʸ�����̣�

��2��
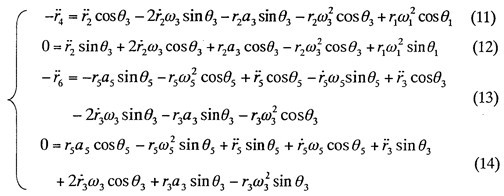
�������ɂ�ʸ������ʽ���ɘ�����ʽ�ķ���ʽ�����£�
ͬ�ӣ���߅�ٌ��r�g���������ɵó����ٶȷ���ʽ��
�tͬ����֪��
ԓ�C�������ǃ����ɶșC���������ڱ����У���횝M���OӋҪ��������{���C�������چ����ɶ���r�£�ͨ�^�����{���U�L�������ڵڶ�ݔ�벻�ӵĵĕr��Ҳ�����_�����^������a��Ч�����ŷ�늙C늙C�ӵĵڶ�ݔ�������a�����ã��{�U�L�����ġ������\�ӷ����փɷN��r��һ�N�dž����ɶ��µ��\�Ӡ�r���ڶ��N�Ǽ����{�����M�е��\�ӷ�����
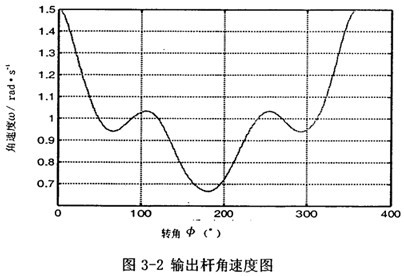
��һ�N��r�O����ݔ����ٶȦ�=1 rad/s���ڶ�ݔ���ٶȞ��㣬�@�r�ஔ��һ�������ɶșC������������δ�����á��C���ĽY���ڳ�ʼ��B����ȫ���Q�ģ��\��matlab����Ӌ�㣬�ó��\�ӷ����Y������D3-2��ʾ��
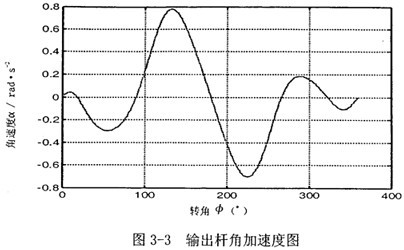
�����ɈD3-2���Կ��������C���Y�������OӋǡ���������{�����g���K3ƫ�Ƶ����m��λ�Õr������һ�������ȣ��a��һ��������ٶȲ��m�ȵ���ԭ�ٶȲ��ӡ����ɈD3-3��֪����δ����ڶ����ɶȕr�����ٶ�׃��ֵ�����f�������غ�늙C�������ز����ܵ����Ӱ푣�������ԭ�Cеϵ�y�ĸ�헅����l�����׃����
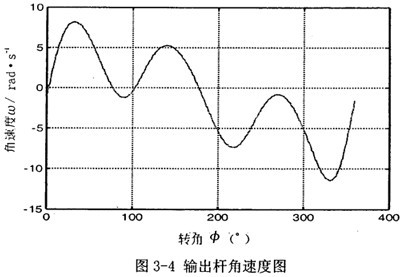
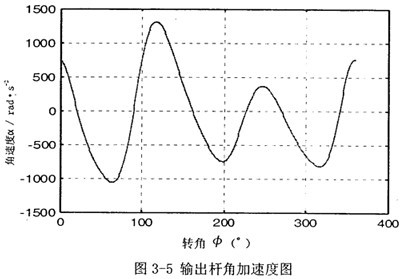
�ڶ��N��r ��һݔ���ٶȺ͵�һ�N��r���ٶ�ֵ��ͬ���F�ڶ�ݔ�뽛�����C���D���������\�Ӻ�ݔ���ٶȞ�v=sin��1����1���һݔ���λ�ƣ������黬�K3���ٶȣ��پ���Ӌ�㣬�ó��Y����D3-4���D3-5��ʾ��
�������D3-4�͈D3-5��֪������ڶ����ɶȕr��ԭ�ٶȲ����ٶȲ��l���ܴ�׃�����@�͵ڶ����ɶ�������Ӻ������кܴ��Pϵ�����ԑ����ú������еĿ��ƺ���������ȡ��������ٶ�ݔ�����@�������Ŀ��Ʋ����ṩ������
��3.4������
���������ٶ��a���b�õęCе�C�����M�����\�ӌW����������MatlabӋ��ܛ�����̽���˶�M�Ǿ��Է��̣����ֆ����ɶ���r�̓����ɶ���r�o���ٶȺͼ��ٶȈD������ֱ�^�Ŀ���ͨ�^�����ٶ��a���b�ñ����a�����ٶȲ��Ӂ������Cе�\���Юa�����ٶȲ��ӣ�������¹��Ą����W�����ṩ��Փ������