���ڻ�ɫϵ�y��Փ�Ķ�Ŀ�˄ӑB�����OӋ
5.1����
�S�����a�ͿƌW���g�ĸ��ٰlչ���Cе�aƷ�c�O����u����١���Ч�����ܡ��p�������Ԅӻ�����lչ���aƷ�Y������څ���s�����乤�����ܵ�Ҫ��Խ��Խ�ߡ��ڬF���Cе�OӋ�У����OӋ�������ܵęCе�aƷ���茦�Cе�ĽY�����ɿ��Լ��ӑB���Եȶ�������M�оC���u�r�������y�Ć�һ�o�B�OӋ�������ܝM�����a���Cе�aƷ�ӑB���ܵ�Ҫ����ˣ���ʹ�Cе�Y��ϵ�yͬ�r�������õ��o���ӑB���ԣ���회����M�ж�Ŀ�˄ӑB�����OӋ��
���ڏ��s�Cе�aƷ�ӑB�����OӋ���˂�������Ô��WҎ����������Ӌ��C�Ԅ���ɽY��ϵ�y�����ă����^�̣��Ա����OӋ�A�μ��ɫ@�þ������ÄӑB���Ե��OӋ�������������P�I�ԵĆ��}����ν����ӑB����Ŀ�˺��������Ĕ��Wԭ���Ͽ����Cе�Y�����ϵ�y���OӋ׃���c��ӑB���ԅ���֮�g��һ�N�߶ȷǾ��Ե�ӳ���Pϵ���o����һ�����εĔ��W��������ʾ�������Ŀ�˺������y�������˹��W�j��һ�T�����lչ�����d�W��,�����ИO���ķǾ���ӳ�书�ܣ���һ�N������̎���Ǿ����Pϵ���������W���ߡ���ˣ����������W�jģ�ͽ����ӑB����Ŀ�˺��������F�Cеϵ�y�OӋ׃���c��ӑB���ԅ���֮�g��ӳ�䣬��Q�ӑB����Ŀ�˺����y�Խ������y�}���@�Ӿ��܉����Ô��WҎ�����Ԅӵ،��F�ӑB�����OӋ��
�ڶ�Ŀ�˄ӑB�����OӋ�У�ͬ�rʹ�ׂ���Ŀ�˶��_���ֵ��һ����f�DZ��^���y�ġ�Ŀ�˺���֮�g�Pϵ���s�������ì�ܣ���������һ����Ŀ�˵ĘOС����������һ����ׂ���Ŀ�˵��ֵ׃�ġ�Ҳ�����f������Ŀ������OС���^�������ì�ܵģ������˂�ֻ�����һЩ�M��⣬�^�����һ���Dz����ڵġ����@Щ�M����е�����ɂ��ⲻһ���ܱ��^�䃞�ӣ���˶�Ŀ�˵Ľ��ǰ�����ġ���ɫ����������ṩ�ˌ����Ŀ�˃������}����M����һ����Ч;����ԓ���������������M���ķ�����������Փ�����ͺ����ԣ��ҷ��������ԏ����M��̶ȿ�������ˮƽ�_���������г��M���ă��Ӵ���Q���ṩ�˸�څ�ڌ��H�ķ�����������
��������˼�룬��������BP�W�jӖ���ӑB����Ŀ�˺��������ڴ˻��A�ϣ����û�ɫ������������A�����һ��X�p����ϵ�y�M���˶�Ŀ�˄ӑB�����OӋ������ԓ�����@���˾��������o���ӑB���Ե��OӋ�������^���y�Ķ�Ŀ�˃����OӋ�������õ��Mһ���ă�����
5.2 BP�W�j
5.2.1 BP�W�j����
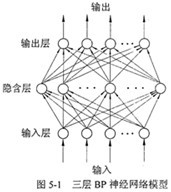
BP�W�j��һ��������Ķ���ǰ���W�j���W�j��ݔ��ݔ�����c�⣬߀��һ�ӻ���ӵ��[���ӹ��c��ݔ����̖��ݔ��ӹ��c�����^�[���ӹ��c��Ȼ��ͨ�^ݔ���ӹ��cݔ����ͬ�ӹ��c�g�]���κ���ϣ���ÿ�ӹ��c��ݔ��ֻӰ���һ�ӹ��c��ݔ����ÿ�����c��ʾ����Ԫ���[�����}�c�����Ă��f��������sigmofd�ͺ�����ݔ���ӹ��c�����Ă��f�����Еr�龀�ԡ�1987��RobertHecht-Nielson�C���ˌ����κ����]�^�g�ȵ�һ���B�m�����������þ���һ���[���ӵ�BP�W�j���ƽ������һ�����ӵ�BP�W�j������������n�S��m�S��ӳ�䡣��Ҋ������BP�W�j�Y����D5-1��ʾ�������ӷQ��ݔ��ӣ����g�ӷQ���[���ӣ����όӷQ��ݔ���ӡ�
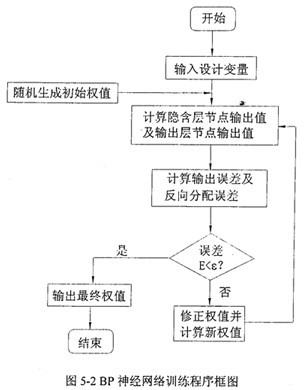
����ǰ����BP�W�j����BP�㷨���{���W�j�B�ә�ֵ���c�ֵ��BP�㷨�����`��������W����������һ�N���͵��`������������BP�㷨��һ���N�н̎��ČW���㷨�������W�j�W���^������Ϣ��������Ӳ����`��ķ�����������A�Θ��ɣ�������������^���У�ݔ����Ϣ��ݔ��ӽ��[��������̎����������ݔ���ӣ����������ݔ���ӵõ�������ݔ�����t�D�뷴��������\���ݶ��½����B�ә��P���`����Č�����ԭ�����B��ͨ·���أ�ͨ�^�ĸ��ӵę�ֵʹ���`����pС��ֱ���_���Ք���ֹ���W�j���^����D5-2��ʾ��
5.2.2����Matlab�W�j������Ӗ��BP�W�j
Matlab�W�j�����������˹��W�j��Փ����A����Matlab�Z�Ԙ���������W�j�ļ������ʹ�OӋ�ߌ����x���W�jݔ����Ӌ��׃�Ɍ���������{�á����⣬�������N���͵������W�j��ֵ��Ҏ�t���W�j��Ӗ���^�̣���Matlab�W�j�������о������˸��N�W�j�OӋ�cӖ�����ӳ����OӋ�߿ɸ����Լ�����Ҫ�{���@Щ�����M�оW�j��Ӗ�����[Ó��ÿ�����ľ����^�̣�ʹ����ȫ��ֵӆ���چ��}�Ľ�Q�����ϣ��Ķ�����˹���Ч�ʺ��|��������Matlab�W�j�������M��BP�W�jӖ�������w�^�����£�
��1����С���S�C����ÿһ�ӵĵę�ֵwi���ֵbi��ʼ�����Ա��C�W�j������ļә�ݔ��ͣ�ͬ�r߀Ҫ�M�����
������O�����ʼ���������`����Сֵerr_goal�����ѭ�h�Δ�max_epoch��������ֵ�ČW���ٶ�lr�ȣ�
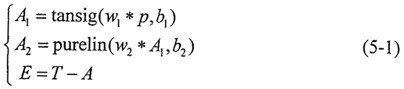
��2��Ӌ��W�j����ݔ��ʸ��A1��A2���Լ��W�j�`��E
ʽ�� A1�����[����ʸ����
A2����ݔ����ʸ����
P�����ӱ�ݔ��ֵ��
T�����ӱ�ݔ��ֵ��
A�����W�jݔ��ֵ��
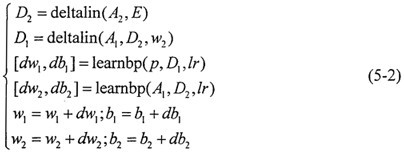
��3��Ӌ����ӷ���������`��׃��D1��D2����Ӌ����ә�ֵ������ֵ���µę�ֵ��
��4���ٴ�Ӌ���ֵ��������`��ƽ���ͣ�
SSE=sumsqr ��T-pruelin��w2*tansig��w1*P��b1����b2���� ��5-3��
��5���z��SSE�Ƿ�С��err_goal�����ǣ��tӖ���Y������t�^�m��
5.3��ɫϵ�y��Փ
5.3.1�Ҕ�
ֻ֪����ŵķ�������֪����_��ֵ�Ĕ������Ҕ����Ҕ�������һ����������һ�����ą^�g��ӛ��

���Oa��^�g��a
i��a�еĔ�������Ҕ�

�^�g��ȡֵ���Qa
i��
��һ�����ܰ�ֵ����ˣ����з�̖��ʾ��
��һ��Ҕ���
��a
i������a
i���ֵ�ĻҔ���

��

��a
i���ǻҔ�
�İ�ֵ���ЕrҲ��a
i��ʾ
��a
i��������
5.3.2���ຯ��
����ij���^�g�ĻҔ�
����ԓ�^�g��ȡֵ�r�����ÿһ������ȡֵ�C����ȣ���ô�@���Ҕ��Q֮�鼃�Ҕ���^���Ҕ�������ȡֵ�C������ȣ���ô�Q�@���Ҕ��������Ҕ��������κ�һ��
��x�����LJ��@ij��x�M�ɵģ�����J��x��
��x���еĵ�λ����Ҫ�������
��x���е�����ֵ���t��һ��������Ҫ�ģ��һ������һ�Ӵ������f(x����ʾ
��x���ϲ�ͬx�ę࣬�t�Q�S��x����
(x���İ��ຯ����
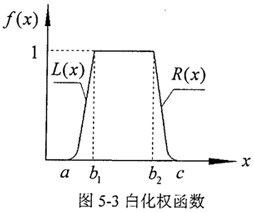
�O����D5-3��ʾ�İ��ຯ��f(x),f(x��E =[0,l]������M��
(l)f(x)=L(x)�����{����xE ��a,bl)
(2)f(x)=R(x)�����{����x E��b2��c)
(3)f(x)==max=1����ֵ��,xE ��b1��b2��
�tf(x���Q����Ͱ��ຯ�����QL(x��������������R(x�����ҽ��������Q�ȣ�[b1��b2]���^����^��ʾ����x����ѳ̶ȣ�������1���Qa�����c��c��K�c��b1��b2���D���c����ֵ�Q���D��ֵ���ֵ��
���ຯ���Ĵ_������ָ�����Π�������c�ͽK�c�Ĵ_�������ຯ�����Π���ָL(x���cR(x�����Π����֪�^�ٵ���Ϣ�r�ɽ���ֱ���Ͱ��ຯ����������֪��Ϣ�^���r�����x�������Ͱ��ຯ����������ʽ�������B���������������������������������B���������ȡ�
5.3.3��ɫ���
��ɫ����ǽ����ڻҔ��İ��ຯ�����ɵĻ��A�ϡ�����������ڲ�ͬ�ľ��ָ�������еİ��������ׂ�����M�Кw�{�����Д�ԓ����������һ�
ӛI����������i=1��2������n��
ӛl#��2����3����������ָ�ˣ�j=1��2������m��
ӛl��2��3��������������k=l,2������n1��
ӛdij��i=l,2������n��j=l,2������m�����i�������j�����ָ�������еİ��������ӱ�����
ӛfjk��dij��,i=1,2,������n��j=1,2������m,k=l,2������n�����j��ָ�ˌ��ڵڂ�k��İ��ຯ����
5.3.4���ɫ������ڶ�Ŀ�˃����OӋ�еđ���
��Ŀ��ģ���������}��Ҫ���ڃ����OӋ��ͬ�r�ж���ָ���_���M��ֵ���䔵�Wģ�͞�
��x=(x1,x2������xn��T
ʹmin f1��x)
min f2��x)
��
minfm��x��
s.t. gj��x����0��j=1��2������j��
����ʽ��5-4)��������x*ʹf1��x)��f2��x)������fm(x��ȫ���_����С���t�Qx*������⡣�ڶ�Ŀ�˃����OӋ�У�����Ŀ�˺����g��Ƽs�������ò�������⣬���M���Ҳ��ֹһ������˶��x��ӽ������ĝM������M��⡣���û�ɫ�������������Ŀ�˃����OӋ�е���M��⣬���w���E������ʾ��
2.���D�Q�ӱ���� ������ ����ָ�˲�ͬ��Ҫ��ͬ������б�Ҫ������Ч���y�ȡ�����Ч���y�ȡ�����Ч���y�ȁ��yһ�ӱ�����ָ��Ҫ��Խ��Խ�á��r����������Ч���y�ȣ�ӛ�yһ��Ęӱ���dij���t��
��ָ��Ҫ��ԽСԽ�á��r����������Ч���y�ȣ���
��ָ�˞��m�ȵ�Ҏ��Ҏ��̫��̫�Ͷ������m�r����������Ч���y�ȣ���
���ӱ��D�Q�õ��D�Q��Ęӱ����
3.�_���ֵ������ �ֵ�����D���cֵ���ɰ�ij�NҎ�tȡ�ã�Ҳ�ɰ��ս���ȵķ����@�ã���ֱ�ӏĽǾ���Ы@�������ֵ�����������Ќ��������С���е��ֵ���������£�
����J�����u��eȡ��1������2������3���������m�����]�C���u�r���ص������ֵ��ȡֵ��������ȡ���
A=[P1d��max����P2d��mean����P3d"��min��] ��5-11��
ʽ�� һ��ȡP1=0.80��P2=1.0��P3=1.20��
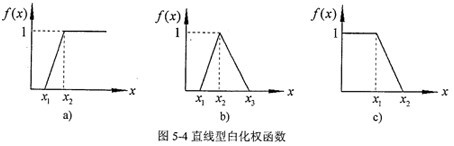
4.�M�л�ɫ��� �������M�о�����e�x�顰1������2������3����r������ຯ���քe�cʽ��5-12������5-14���͈D5-4������
�ٻ��

E[x
2����]
�ڻ��

E [x
1��x
2��x
3]
�t��j��ָ�ˌ��ڵ�k����Ę��¶�����jk��
ʽ�� ��jk����ƒjk���ֵ���c����x1��x2��x3�Č�����
����ָ�˵ĵ�i��������ڵ�k����ľ��ϵ����ik
�����ϵ�`����ꇦ��M�Кwһ��̎���õ��wһ����ꇦ�c
5.����M��� �O��
W=��c��AT=��W1��W2������Wn��T ��5-17��
W1��W2������Wn�քe����F1��F2������Fn�ľC���u��ֵ��ֵ����ߞ���M��⡣
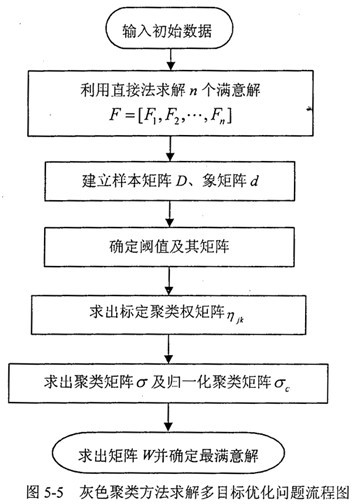
����Ŀ�˃������}��M���ij����D��D5-5��ʾ��
5.4�p�����Ķ�Ŀ�˄ӑB�����OӋ
5.4.1�OӋ׃��
�����A�����һ��X�p�����ĽY���̓�����Ŀ�ˁ��_���OӋ׃�������P�OӋ׃������7�����քe�飺�����S���c�����S�ΰ돽rl�����X�돽r�����܅��c�����S�αں�b2���L�����b�����g����܉�E������ֵA�������S���c�����S���S�Ll1�����܅��c�����S���S�Ll2���t�OӋ׃����
x=[x1��x2,x3,x4,x5,x6,x7]=��r1��r,b2,b,A��l1��l2] ��5-18��
���OӋ׃���ĺ��xҊ�D5-6��
5.4.2Ŀ�˺���
5.4.2.1��Ŀ�˺����Ĵ_�����n�}�о���Ŀ���Ǟ��OӋ���Y���o��������ߴ�С������Ч�ʸߡ��ɿ��Ըߡ��ӑB���ܺõ����͈A�����һ��X�p���������Դ˞��������_����Ŀ�˃����OӋ��Ŀ�˺�����
��ʹ�OӋ���Ĝp�����m�����rҪ���ڂ��ӱ�һ�����M����fŤ�ص�ǰ���£��p�����ď���ߴ�V���M���pС��������Ȍ��p�����ď���ߴ���С�ƣ����Ŀ�˃�����Ŀ�˺���֮һ����
ƒ1��x��=min��V��=min��x1+2x2-x4�� ��5-19��
���ϸ��Ļ�����U��Ӱ��X݆����Ч�ʵ�һ����Ҫ���أ��齵�͇��ϸ��g��ĥ�p����߂���Ч�ʣ�����������СҲ�����Ŀ�˃����е�Ŀ�˺���֮һ����
ƒ2��x��=min��U�� ��5-20��
���|���g��ƣ���c�g�ǂ��ӵ���ҪʧЧ��ʽ��������߂��ӵĿɿ��ԣ���߹��������������X���ӽ��|���ȵĿɿ����������Ŀ�˺���֮һ���ڈA�����һ��X�����У����X�քe�c�����S�����ܡ����w���|�������ϸ����|���ȵĿɿ��Էքe��Rl,R2,R3���t�xȡ�����пɿ�����͵Ľ��|�����郞��Ŀ��R����R=min{ Rl,R2,R3}����ʹR�Ŀɿ����_���O��ֵ����ʹ��Ŀ�˺����yһĿ�H�y�ȣ����xȡĿ�˺�����ʹ�����пɿ�����͵Ľ��|����ʧЧ����ͣ�Ҳ��
ƒ3��x��=min��1-R��=min��1-min{ Rl,R2,R3}�� ��5-21��
��ʹ�p����ϵ�y�������õĄӑB���ܣ���ʹϵ�y���Aģ�B��ȱ��^�����e��Σ�Uģ�B�Ą����Ҫ�M����С���O�p����ϵ�y�ĸ��Aģ�B���ֵ��A��i=1,2,3)��ͨ���Ɍ��@���A��ģ�B���ֵ�����Ŀ�˺��������ڜp�����Ķ��Aģ�B����^�����A��ֵҪ��ö࣬���ԃHȡmax{A1}����Ŀ�˺�������ʹ���_���OСֵ��Ҳ����Ŀ�˺�����
ƒ4��x��=min��max{A1��A2��A3}�� ��5-22��
��M����Aģ�B��ȱM���ܾ����Ҫ�ɽ�����һ��Ŀ�˺�����
ƒ
5��x��=

��5-23��
ʽ��Av�������Aģ�B��ȵľ�ֵ��rad����N��mm��-1��
�C�����������OӋ�������ܵĈA�����һ��X�p�������茦���M�ж�Ŀ�˄ӑB�����OӋ������Ŀ�˞�ʹ�p�����w�e�����ϸ��g�����ʡ�Σ�Uģ�B�Ą�����_���OСֵ�����ϸ����|���ȵĿɿ����_���O��ֵ����ʹϵ�y���Aģ�B��ȱM���ܾ����ɴ˿�Ҋ����Ŀ�˺�������5����
ƒ={ƒ1��x����ƒ2��x����ƒ3��x����ƒ4��x����ƒ5��x��} ��5-24��
5.4.2.2�W�jӖ���ӱ��͙�ֵ�Ĵ_��
�ڈA�����һ��X�p�����Ķ�Ŀ�˃����OӋ�У�����Ŀ��ƒ4��x����ƒ5��x���ĺ���ֵ�ǽ��^ϵ�y�ӑB����ֱ�ӵõ��ģ��w�F�˙Cе�Y�����ϵ�y���OӋ׃���c��ӑB���ԅ���֮�g���Pϵ����һ�N�߶ȷǾ��Ե�ӳ���Pϵ����˟o����һ�����εĔ��W��������ʾ�����IJ����W�j���F�Cеϵ�y�OӋ׃���c��ӑB���ԅ���֮�g��ӳ�䣬������ԓ�W�jģ�ͽ����µķ�Ŀ�˺��� �� ��x)�������܉��ṩӖ���ӱ����ڵ�4���҂������ˈA�����һ��X�p�����Ą����W����ģ�ͣ��������M���˄ӑB���Է��������w���E�@�ﲻ��٘�����քe�����W�j������Ŀ�˺���f4(x����f5��x���M�к����ƽ����F��f4��x�������f���W�j������Ӗ�����^�̡�
���������OӋ׃������BP��j��ݔ����������Ӌ��f4��x���ij����еõ����ģ�B���ֵ����W�j�Ľ̎��ӱ���ͨ�^�����׃�OӋ׃����ֵ���Եõ���M�OӋ׃���c���ģ�B���ֵ֮�gӳ��Ęӱ������@���xȡ38�Mӳ�������W�jӖ���ӱ�������ϵ�y��7���OӋ׃������˿��Խ���һ��ݔ���7�����c���[����7�����c��ݔ����1�����c������BP�W�jģ�͡�����Ӗ���ӱ��;W�jģ�ͺͿ�������Matlab�е��W�j�������M��Ӗ�����Ա�õ��OӋ׃���c���ģ�B���֮�g�ľ��_ӳ���Pϵ��
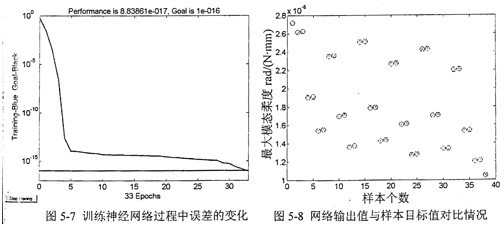
�M�ЄӑB�����r����Ҫ������Ŀ�˺���������Ҫ�@��һ�M�܉_Ӌ��f4��x���ę�ֵ���@����Ҫͨ�^�ӱ�Ӗ��BP�W�j�����`����_��Ҫ��r��Ӗ��ֹͣ�����õ���ԓ�M��ֵ������ԓ�M��ֵ�c�OӋ׃��ͨ�^����BP�W�j����Ӌ���Ӗ����ķ�Ŀ�˺���ֵf4��x������Ӗ���W�j�r���W������ȡ��0.01����������ȡ��0.9��Ŀ���`��ȡ��l��10-16����Ӗ���Y���r���W�jݔ��ֵ�c�ӱ�Ŀ��ֵ֮�g���`�������ֵ��8.8386��l0-17��Ҋ�D5-7)��Ӗ���^���`���׃����r��Ӗ����ɺ�W�jݔ��ֵ�c�ӱ�Ŀ��ֵ������r��D5-8��ʾ��
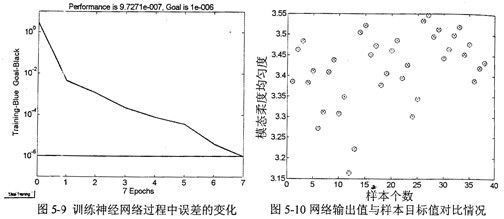
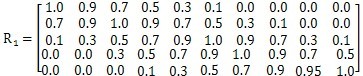
��ͬ�ӵķ�����f5��x���M���W�jӖ����Ŀ���`��ȡ��1��10-6���W�jݔ��ֵ�c�ӱ�Ŀ��ֵ֮�g���`�������ֵ��9.7271��10-7��Ҋ�D5-9����Ӗ���^���`��׃����r��Ӗ����ɺ�W�jݔ��ֵ�c�ӱ�Ŀ��ֵ������r��D5-10��ʾ��
�ڽ����W�jģ���^���У���Ҫע��������Ć��}��
1.ݔ�녢�����x�� ݔ�녢���x������_�c�����W�j��ģ���P�I����ݔ�녢��̫�࣬����Ӱ푽�ģ��Ч�ʣ���ݔ�벻�㣬�֕�Ӱ푽�ģ���ȡ����Ľ��^���A�����һ��X�p�������OӋ׃�����м��������x�����е�7��׃�������W�jģ�͵�ݔ�녢����
2.Ӗ���ӱ����x�� ����������OӋ���g�x��ӱ�����ʹ���������ľW�jģ�;���ȫ���ԣ�����Q�ӱ��������}�����W�j��Փ��һ���д������о��Ć��}����ֱ��Ӱ푵��W�jģ�͵ľ����c�����ԡ������ڸ��OӋ׃�����S�ķ����ȣ��xȡ��38��Ӗ���ӱ���
3.�[�ӹ��c�����x�� �x���[�ӹ��c���Ķ����Pϵ���W�j��ģ�ijɔ����[�ӹ��c�Ĕ�Ŀ�c���xȡ��Ӗ���ӱ����g���P���[�ӹ��c��̫�٣��W�j�y��̎���^���s�Ć��}�����ҕ�ʹ�W�j��ģ�`���������[�ӹ��c��̫�࣬��ʹ�W�jӖ���r�g�������ӣ��֕�Ӱ�Ӗ���ٶȡ�������Ӗ���W�j�^���У����^���͇Lԇ���J���xȡ7���[�ӹ��c���rӖ��Ч����á�
4.�W�����ʵ��x�� �W�����ʵĴ�С���㷨���Ք������кܴ��Ӱ푡���ȡֵ̫�����F�㷨���Ք�����W�������x��̫С����ʹӖ���^�̕r�g������ӣ�Ӱ�Ӌ��Ч�ʡ�һ���x���0.01��0.1�����ĸ���Ӗ���^�����ݶ�׃���;����`��׃��ֵ���xȡ�W�����ʞ�O.01��
5.4.3ģ���s���l��
5.4.3.1�s���l���Ĵ_�� ���]����ȫ�S�õ���ȫ���S�õ��н��^���^�̣��ѻ��X���ӵĽ��|���Ⱥ�Ť�D���ȵ����ܼs�������Ͻǡ�����Зl���Ȏμs�������OӋ׃���������s���ȵ�ȡֵ��������ҕ���OӋ���g�ϵ�ģ���Ӽ������ǵõ����µļs���l����
(l���������X���|���g�l��ƣ���c�g��ʧЧ��ʽ�����X���ϸ��g�Ľ��|������С�ڽ��|ƣ�ڏ����S�Ñ��������и����ϸ����|������Ӌ�㹫ʽҊʽ(3-l)����

��5-25��
(2���鱣�C�����S��Ť�D�r�������ď��ȣ����ʹ�����Ĺ����������������^���ϵ��S�ü��������ڈA�����һ��X�p�����Ă����S�У����ܵĿ����S�β�������鱡���ĭh�����t��Ť�D�ď��ȗl�����M�㣺

��5-26��
ʽ�� T����ݔ��Ť�أ�N��mm����
W
n������Ť����ϵ��W
n=

��D
4-d
4����
D�������ܿ����S�β����⏽��mm����
d�������ܿ����S�β��փȏ���mm����
(3��һ��Cе�O���еĂ����S����Ҫ��������ď����⣬����߀Ҫ����׃��������һ���ķ����ȣ���Ҫ������SҪ����һ���Ą��ȣ�Ҳ�����S����λ�L�ȵ�Ť�D�Dz��ܳ��^�S��λ�L���S��Ť�D�ǣ��t����Ť�D�Ą��ȗl���飺

��5-27��
ʽ�� I
P��������O�T��I
P=

��
GIP������Ť���ȣ�N��m����
(4�����OӋ�A�����һ��X���ӵĝL���ĽY���ߴ�r���鱣�C���|���g���_�Ă������迼�]�ڂ��fŤ��һ����ǰ���£��L������ȑ��M����X���ϸ��g���|������Ͻǵ����ƣ���
��5����M����X�������_�B�m���ӵėl�������ҝL���X�α�횱��C���l����У���
��6���OӋ׃�����½�s����
5.4.3.2�`�ٺ������ݲ�Ĵ_�� ģ���s�����`�ٺ������������s�������|�����w�_�����麆��Ӌ�㣬���ľ����þ����϶��ٺ������������ܼs�����õ��`�ٺ�����ʽ��
ʽ��

����ģ���s���^�Ʌ^�g�����ޡ�
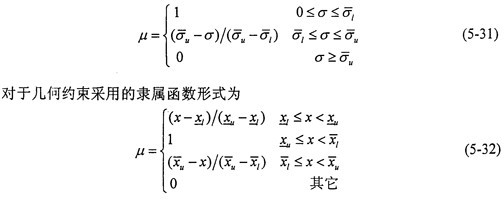
�oՓ�x��ηN��ʽ���`�ٺ���������Ҫ�_��ģ���^�Ʌ^�g���ϡ��½硣��ˣ�������Ҫ�_���^�Ʌ^�g���ݲ���^�ݲ�����^�Ʌ^�g�Ŀ��L�ȣ����H�Ͼ��Ǽs�����Ƶ����Sƫ��_���ݲ�ķ����и��ʷ�������ģ���C���u�з����U��ϵ�����ȡ�ǰ�ɷN������Ҫ�����ĽyӋ�����Y�ϣ������г��õ��ǔU��ϵ�������U��ϵ�������ڳ�ֿ��]������ͨ�OӋҎ�����OӋ���Ļ��A�ϣ�ͨ�^����U��ϵ���£����������Uϵ���º������Uϵ���£����_���^�Ʌ^�g�ϡ��½��һ�N������
ͨ���xȡ =1.05��1.30����=0.7��0.95��
5.4.3.3�ˮƽ�ؼ��Ĵ_�� �����ˮƽ�ؼ����팍�F��ģ������ģ������ͨ����ģ�͵��D�������҂�Ҏ��ijһ�`�ٶȦˣ�O�ܦˡ�1��ֵ�ĕr����ģ�����Ϸֽ��һ����ͨ�ļ��ϣ���ģ���������}�D������ͨ�������}̎������һϵ�в�ͬ�Ħ˵���ͨ��������һ��ģ�����ϡ���ˣ��˽ؼ��ǜ�ͨ��ͨ�����cģ�����ϵĘ�������ȡֵԽ���OӋ�Y��Խ�ɿ�����ȡֵԽС���OӋ�Y��Խ������������[O,l]�^�g�ȴ���һ����ѵĦ�*ֵ��ʹ�OӋ�Y���Ƚ����ֿɿ����������*�ؼ����nj��Fģ�������OӋ����ͨ�����OӋ�D�����P�I�����IJ��ö���ģ���C���u�еķ�������*���քe����������ؼ������ؙ��ؼ������صȼ����ؼ������_���u�Д��Wģ�ͣ��ɴ�Ӌ��������ˮƽ��*��
����o�����ö���ģ���C���u�з��ľ��w���E��
1.�_�����ؼ� ���ö���ģ���C���u�д_���ˮƽֵ��*����ģ������ģ���D�����ˮƽ�ؼ��ϵij�Ҏ����ģ�͡�Ӱ푦�*ȡֵ�����ء����صȼ������`�ٶ�Ҋ��5-1���`�ٶȿ��Բ���ģ���yӋ�����Ɍ��Ҵ�ַ��_�������IJ��Ì��Ҵ�ַ���
2.�_����� ��������u���ߌ��u�Ќ�����������ĸ��N�����u�r�Y����Ԫ�ؽM�ɵļ��ϡ����OӋ���u�Ќ�����ˮƽ�ؼ��ˣ���ȡֵ�^�g������[0,1]�^�g�������OӋ�l����Ҫ�քe���ֵĸ��xɢֵ�����u�Ќ������ȡ���
��={0.30,0.40,0.50,0.60,0.65,0.70,0.75,0.80,0.85,0.90} (5-33)
3.�_�����ؙ��ؼ������صȼ����ؼ� ��ͬ�������������u�Ќ������Ҫ�̶Ȳ�ͬ����ʴ_��ӳ�����ؼ����صȼ����u�Ќ���˵�Ӱ푣����x������ؼ����صȼ������ę���W��wi����ģ���C���u���^���У������Ĵ_���dz���Ҫ���������OӋ�l�����_�����ؙ��ؼ�W��
W={0.25,0,30,0.20,0.10,0.10,0.05} (5-34)
��5-1Ӱ����صȼ������`�ٶ�
|
Ӱ����� |
���صȼ� |
�`�ٶ� |
|
1 |
2 |
3 |
4 |
5 |
1 |
2 |
3 |
4 |
5 |
|
��1�OӋˮƽ |
�� |
�^�� |
һ�� |
�^�� |
�� |
1.0 |
0.8 |
0.3 |
0 |
0 |
|
��2����ˮƽ |
�� |
�^�� |
һ�� |
�^�� |
�� |
1.0 |
0.7 |
0.5 |
0 |
0 |
|
��3���|�� |
�� |
�^�� |
һ�� |
�^�� |
�� |
1.0 |
0.8 |
0.2 |
0 |
0 |
|
��4ʹ�×l�� |
�� |
�^�� |
һ�� |
�^�� |
�� |
0 |
0 |
0.5 |
0.8 |
1.0 |
|
��5��Ҫ�̶� |
����Ҫ |
��̫��Ҫ |
һ�� |
�^��Ҫ |
��Ҫ |
0 |
0 |
0.5 |
0.9 |
1.0 |
|
��6�S���M�� |
�� |
�^�� |
һ�� |
�^�� |
�� |
0 |
0 |
0.5 |
0.85 |
1.0 |
������5-1�ɷքeӋ��õ������صȼ��ę��ؼ�Wi
W1={0.476��0.381��0.143��0��0}��
W2={0.455��0.318��0.227��0��0}��
W3={0.500��0.400��0.100��0��0}��
W4={0��0��0.217��0.348��0.435}�� ��5-35��
W5={0��0��0.208��0.375��0.417}��
W6={0��0��0.213��0.362��0.425}��
4.�M��һ��ģ���C���u�� һ��ģ���C���u�м��������u�У���ͨ�^�C��һ�����صĸ����ȼ����u�Ќ���ȡֵ��Ӱ푁�̎�����ص�ģ���ԡ����������صȼ������u�Ќ���˵�Ӱ푣��_�������صĵȼ��u�о��Ri��i=1��2������6�����Ԧ�1���OӋˮƽ����������ȼ��u�о��R1�_����
��5--36��
R1�ĺ��x�飺���OӋˮƽ�ߕr���˽ؼ�ˮƽȡ��ֵ�����F�錦�u�Ќ���˵��`�ٶ��ɴ�С�����OӋ�����S�÷������Դ�֮���OӋˮƽ�ͣ��˽ؼ�ˮƽȡ��ֵ������M������+���ϳ��\��ģ�ͣ��քe����i��������һ���C���u�У�ԓģ�Ͱ�����ͨ��ꇳ˷�Ӌ�㣬�ܱ���һ��������Ϣ������ȫ�濼�]�������ص�Ӱ��Լ��������ص��u�нY������һ��ģ���C���u�м�Bi=Wi Ri����Bi��i=1��2������6�����ɶ���ģ���C���u�о��R����Ӌ��B1����
B1=��1 R1=[b1��b2��b3��b4��b5��b6��b7��b8��b9��b10]
=[0.757��0.814��0.786��0.681��0.538��0.381��0.243��0.138��0.043��0.014] ��5-37��
ʽ�� b
j=

5.�M�ж���ģ���C���u�� �M�ж���ģ���C���u�У����ȴ_���C��ģ��׃�Q���R
��5.38��
�C�Ͽ��]�����ص�Ӱ푣�����ģ��׃�Q��ꇣ�����M������+���ϳ��\��ģ�ͣ��õ�����ģ���C���u�еĿ����u�нY����
B��W R=(0.591,0.654,0.674,0.651,0.583,0.502,0.407,0.314,0.231,0.183)
6.�_����K�u�нY�� ���üә�ƽ������ȡ��bi����������������Ԫ�ط��M�мә�ƽ����ֵ�����u�еĽY������
�Y��ǰ��Ӌ��Y��������ʽ��5-39)������ˮƽ�ؼ���*=0.5875���Ķ���ģ���������}�D���鳣Ҏ�������}��
5.4.4���ڻ�ɫ������Ĝp������Ŀ�˃����OӋ
�ڈA�����һ��X����ϵ�y�Ķ�Ŀ�˃����OӋ�У����û�ɫ������������ڶ����M���֮�g����һ����M��⡣��ˣ����ȱ�������M��Ŀ�˃����ĝM��⡣�����xȡ�M���ij��l�c��ͬ���Ķ����²�ͬ�ěQ�߷������ڙCе��Ŀ�˃����OӋ�г��õĽⷨ�У���ҪĿ�˷��������c�������Լә�M�Ϸ���ƽ���ә�M�Ϸ����˳�������Чϵ�����ȡ����IJ�����ҪĿ�˷�����Ŀ�˃����ĝM��⡣
��ҪĿ�˷��������OӋ���J������Ҫ��Ŀ�˺������������Ŀ�˺�������s���l���ķ��������磬���Of1��x������ҪĿ�ˣ��t�������Wģ��׃��
��x=��x1��x2������xn)T
ʹminf1��x) (5-40)
s.t gj��x����0��j=1��2������J��
g
j��x��=[f
1��x��-

]��0 i=2������I
ʽ��

����ԭ���}��i��Ŀ�˺���������ֵ��i=2������I����
�����зքe�Ը���Ŀ�˺���������ҪĿ�ˣ���������Ŀ�˺�������s���l��������Matlab����ܛ���еă����������M�І�Ŀ�˃������ɷքe�õ�5�M�����OӋ�ĝM��⣬���σ���ǰ�ij��x�OӋ����x=��20.5��4��3��2��4��24��64��T���t���НM���A����������ʾ
x��1��=��18��5��3��3��3��5��22��68��T
x��2��=��18.5��5��5��2��4��22��68��T
x��3��=��20.5��5��5��2��4��5��22��68��T
x��4��=��20.5��4��3��2��4��24��64��T
x��5��=��22��5��3��3��4��22��68��T
x��6��=��22.5��5��4��3��2��3.5��22��68��T
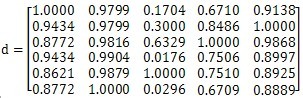
���挢����ɫ�������������6�M�M���������һ����M��⡣��ÿ�M�M���քe�����Ŀ�˺����У��õ��ӱ���ꇞ�
��5-41��
�D�Q�ӱ���ꇣ�������Ŀ�˲�������Ч���y�ȣ�����ʽ��5-7���õ����ꇞ�
��5-42��
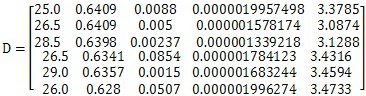
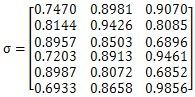
����ʽ��5-10�����������Ќ��������С���еȵ��ֵ���õ�d��max��=1��d��mean��=0.7949��d"��min��=0.1704�����ȡ�C���u�r���ص������ֵ��A=��1.0��0.8��0.2����
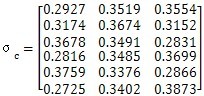
�������M�о�����e�x�顰1������2������3�����������ŷքe�cʽ��5-12������5-14���͈D5-4�������F��f1�������f����ð������ֵ�ķ��������������еĵ�һ�У�d��max��=1��d��mean��=0.917��ȡ0.9��d��min��=0.8621��ȡ0.86����ˣ����ڻ��1����x1=0��x2=1�����ڻ��2����x1=0��x2=0.9��x3=2��x2=1.8�����ڻ��3����x1=0.86��x3=2��x1=1.72��ͬ��������������Ŀ�˸������ֵ������ʽ��5-12������5-14�����������ຯ������ֵ����ʽ��5-15������˶�����ꇦ�

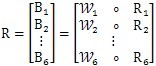
��5-43��
����jk����ʽ��5-16����������ϵ����ꇦ�
��5-44��
�����M�Кwһ��̎���õ��wһ����ꇦ�c
��5-45��
����ֵ����ʽ��5-17���еõ�
W=��W1��W2��W3��W4��W5��W6����T
=��0.6453��0.6744��0.7073��0.6344��0.7032��0.6221��T ��5-46��
��ʽ��5-46����Ҋ��W3=0.7037��t�䌦���Ľ����M��⡣Ҳ��
x*=(20.5,5,5,2,4.5,22,68��T
�ҝM���ă��Ӵ����F3��F5��F2��F1��F4��F6��
������C������ĽY�������Ƿ���ԭ�OӋ������������ǰ����p�����o���ӑB����ָ�������������5-2��ʾ��
��5-2����ǰ��p�������܌���
|
|
����ߴ�
(mm) |
�����S���|����
�ɿ��� |
���w���|����
�ɿ��� |
���ܽ��|����
�ɿ��� |
|
����ǰ |
26.5 |
0.9744 |
0.9781 |
0.9145 |
|
������ |
28.5 |
0.9992608 |
0.9999511 |
0.998002 |
|
|
������ |
���ģ�B���
��10-6��rad/(N��mm)) |
ģ�B��Ⱦ���
|
���l
(Hz) |
|
����ǰ |
0.6341 |
1.78412 |
3.4316 |
644.357 |
|
������ |
0.6398 |
1.33922 |
3.1288 |
726.257 |
����5-2������֪��������Ĝp�����OӋ����������ߴ�ͻ����ʃ��ָ���⣬��������ָ�˾���Խ�ڃ���ǰ���OӋ�������e�ڿɿ��Ժ̈́ӑB���Է���õ��^��ă�����ͨ�^�cԭ�OӋ�������^���l�F���p���������S�����ܼ����w���|ƣ�ڏ��ȵĿɿ��Ⱦ����˺ܴ����ߣ�ϵ�y�Ķ��AΣ�Uģ�B��ȏ�l.78412��l0-6rad/��N��mm�����͵��������1.33922��l0-6rad����N��mm)��ģ�B��Ⱦ��ȏ�3.4316���͵��������3.1288���f�����Aģ�B��ȵķֲ���������⣬�������ϵ�y���l���˺ܴ����ߣ���ԭ��644.357Hz��ߵ�726.257Hz���伤���l�ʞ�25Hz����Ҋ��������Y�������ˮƽ��ԭ�OӋ�����õ����ஔ��ĸ��ơ�
5.5�����Y
1.����BP�W�j�ĸ߶ȷǾ���ӳ�书�ܣ����õ�4�������������Ą����W����ģ�ͣ��@����38�M�Y���OӋ׃���͌����ĄӑB���ԅ������W�jӖ���ӱ���ͨ�^Ӗ�������������܉F�Y���OӋ׃���c�ӑB���ԅ���֮�gӳ�������BP�W�jģ�ͣ����F�ˈA�����һ��X�p�����Y���OӋ׃���c��ӑB���ԅ���֮�g��ӳ���Pϵ���Ķ������˶�Ŀ�˃����OӋ�ĄӑB��Ŀ�˺�����
2.��ģ�������OӋ�ɹ��ؑ��õ��ˈA�����һ��X�p�����ă����OӋ�У���ֿ��]�˼s���l����ģ���ԣ�ʹӋ��Y���c���H�Y�ϵø��o�ܣ������Б��Ãrֵ�������ˮƽ�ؼ��M�Ѓ����OӋ�����]�˽Y���OӋ�����ĸ��NӰ����أ�����ֵ��w�F�˽����ԣ�
3.�ĈA�����һ��X�p�����ĽY�������o���ӑB���Գ��l������5����Ŀ�˺�����ͬ�r���]���ȡ����ȼ��εȼs���l���������A�����һ��X�p������Ŀ�˃����OӋ���Wģ�͡����û��^�������������K�õ���Ŀ�˃����OӋ����M��⡣