�W�j�����ܻ������b���ھ������\��ϵ�y�ļ���
4.1 ����
���������\��ϵ�y�о��������\����Փ�;��w���`���涼ȡ�����^����Mչ��������u�γ�һ���������о��I��ԓ���g�����a���H�еďV�����õ춨�ˈԌ��Ļ��A��������Č��ҌW���������_�l��һ���������\������ϵ�y��ȡ����һ���Ľ���Ч������Ч�档�����@Щ��Փ�о��͌��`�������������ڹ����\���I���������}����⣬��������֪�R���\��ϵ�y�ǿ��ܵġ������ĺͺ��m�ġ�Ȼ����Ŀǰ���о�����ƫ�����\���I���е��ض����}�����\��ģ�͡�֪�R��ʾ�����������ȣ�����ƫ����ϵ�y�_�l�^�����ض��A�εľ��w���F���g�ͷ������������������\��ϵ�y���_�l�ͽ�����δ�γɾ����������c��ϵ�y��Փ�ͿƌW�ķ����wϵ��
���ڂ��y�Č���ϵ�y���҂��ƺ�������һЩ���Խ��b�ġ���څ�˜ʵ��_�l���g�Ͳ��ԡ�Ȼ�������\������ϵ�y�ڹ�����ʽ���c����������͵Č���ϵ�y���OӋ�͌���ϵ�y���Q���͌���ϵ�y�ȣ����^��IJ���@��Ҫ���F���\������ď��s�ԡ��\���΄յ���ɢ�ԡ��\����Փ�ͷ����IJ������ԡ��\��֪�R���y�@ȡ�ԡ��\��Y���IJ��_���Ժ��\��h���Ķ�׃�Եȣ���ʹ�ڽ�������\������ϵ�y�r�y���x����m��ԭ��ϵ�y���酢�����]�И˜ʵ��_�lģʽ����ѭ�����Ҳ��ܜʴ_���A�y�_�l�^���п���Ҫ���������y�������Ľ�Q�k�����@Щ����ʹ�������\��ϵ�y�Ľ��칤���O�鷱�������y��Ŀǰ���еĹ��������\��ϵ�y��֪�R��Y������Q���}��������\֪�R�ĽY�ϡ�֪�R�ī@ȡ�����e���������_����̎���ȶ���������ͬ�̶ȵ�ȱ�ݣ��@�c���������_�l�\��ϵ�y�r����ȡ�����Ʋ��Ժͷ��������е��Pϵ����ϲ���ǣ�һЩ�о������_ʼ�J�R���о��_�l���������\��ϵ�yһ�㷽������Ҫ�ԣ�����u�����˵��о������@�����x���v���ӏ������\��ϵ�y�_�l���Ժͷ������о���ʮ�ֱ�Ҫ�ġ�
4.2 �����\��ķ���
�O������\�༼�g�lչ�����ɞ�һ�T�����Ŀ�W�ƵľC����Ϣ̎�����g�������Կɿ�����Փ����ϢՓ������Փ��ϵ�yՓ����Փ���A���ԬF���yԇ�x����Ӌ��C�鼼�g�ֶΣ��Y�ϸ��N�\������ϵ�y���O�䡢�C�����b�á����̽Y������ˇ�^�̵ȵȣ�������Ҏ�ɶ����γɵ�һ�T���d�W�ơ����w�����������ֽM�ɣ���һ���֞�����\�����������W�^�̵��о����ڶ����֞�����\����Ϣ�W���о����������֞��\��߉�c���Wԭ��������о����O������\�༼�g�IJ�ͬ�ĽǶȳ����ԷֳɃɴ�����ڔ��Wģ�͵Ĺ����\����ͻ����˹����ܵĹ����\�����ÿ��ְ������ɾ��w���\�������D4.1 ��ʾ��
1)���ڔ��Wģ�͵Ĺ����\���
ԓ������������ֱ�Ӝy��ϵ�yݔ��ݔ������̖̎���ķ��������ڠ�B��Ӌ�ķ����ͻ����^�̅�����Ӌ�ķ�����
A.����ֱ�Ӝy��ϵ�yݔ��ݔ������̖̎���ķ�����ֱ�Ӝy�����\���������P��ݔ���������ݔ��������Ҏ��������׃�������t�����J�錦���ѽ���Ҫ�l�����ϡ��@�N����Ҳ���^�y�������mȻ�������Σ������׳��F���ϵ��`�к�©�С�
B.���ڠ�B��Ӌ�ķ�����ͨ�^��Ӌϵ�y�Ġ�B���Y���m��ģ���M�й����\�ࡣ�����ؘ����\���^�̵Ġ�B�������ɚ������У����������а������N������Ϣ�������@�����У�ͨ�^�����m����ģ�Ͳ����ýyӋ�z�����ܰѹ��Ϗ��Йz�y���������Mһ���ķ��x����Ӌ�͛Q�ߡ���B��Ӌ�ķ���ͨ���Ǡ�B�^�y�����V������
C.�����^�̅�����Ӌ�ķ����c���ڠ�B��Ӌ���\�����ͬ��������ҪӋ�㚈�����У����Ǹ�������׃���ĽyӋ���ԁ�z�y���ϵİl���������M�й��Ϸ��x����Ӌ�ͷ�����ڿ��Խ��������c�^�̅����ľ��_ϵ������@�N�����Ȼ��ڠ�B��Ӌ�ķ����������ڹ��ϵķ��x����С���˷����Ό��ã��Dž�����Ӌ�����x������
���ڔ��Wģ�͵Ĺ����\������䃞�c��������ϵ�y���|�ĄӑB���|�͌��F���r�\�࣬ȱ�c�Ǯ�ϵ�yģ��δ֪�����_������зǾ��ԕr���@�N���������F��
2�������˹����ܵĹ����\���
ԓ�����������ڌ���ϵ�y�ķ��������ڰ������\���������ģ�����W�ķ����������˹��W�ķ����ͻ��ڹ��Ϙ�ķ�����
A.���ڌ���ϵ�y���\����ǹ����\���I�����������עĿ�İlչ����֮һ��Ҳ���о���ࡢ������V��һ������\�༼�g�������½��v�˃ɂ��lչ�A�Σ����ڜ\֪�R���I�ҵĽ��֪�R���Ĺ����\��ϵ�y�ͻ�����֪�R���\�������ģ��֪�R���Ĺ����\��ϵ�y��
���ڰ���������������ͨ�^��ӆ���Ɔ��}�ijɹ��Y����������}������ͨ�^���@ȡ��֪�R���鰸�����M�ЌW��������ҪԔ�����\������ģ�͡����@�N���������У���Ҫ�ļ��g�������������_�������������ęz������������ӆ����ʧ���ЌW���ȡ����ڰ������\�����ԭ���ǣ��������\��Č������������İ������Йz�����cԓ������\�����}������ƥ��İ�����Ȼ��ԓ�������\��Y���M����ӆ����ԓ������\��Y����
B.���ڰ������\����m�����I�����y�Ա�ʾ��Ҏ�t��ʽ�����ױ�ʾ�ɰ�����ʽ�����ѽ��e�����S���İ������I�����t�W�\��ȣ������ľ������ǣ����y�Ļ��ڰ������\����y�Ա�ʾ����֮�g��ϵ�����ڴ��Ͱ������M�Йz���dz��M�r�������y�ԛQ�����x����Щ�Y������ę��أ����ڰ������\����y��̎��������ӆ�r��һ���ԙz��������׃���g�ļs���Pϵ�����y�Ԍ��\��Y�����Խ�ጡ�
C.�����˹��W�ķ���
��������W�j���䪚�ص����e���롢�Ɯy��ӛ�������m�����ԌW����̎����s��ģʽ�ȃ��c�����S���W�����������о��ğᳱ��ͬ���ڹ����\���I����lչǰ��Ҳ��ʮ�֘��^�ġ�
��֪�R�@ȡ�ϣ��W�j��֪�R����Ҫ��֪�R���̎��M�����������Y�Լ������I�ҵ�֪�R��ֻ��Ҫ���I�ҽ�Q���}�Č���������Ӗ���W�j����֪�R��ʾ���棬�W�j��ȡ�[ʽ��ʾ����֪�R�@ȡ��ͬ�r���ԄӮa����֪�R�ɾW�j�ĽY���͙�ֵ��ʾ������ijһ���}������֪�R��ʾ��ͬһ�W�j�У�ͨ���ԏ������ڌ��F֪�R���Ԅӫ@ȡ�Ͳ�������������֪�R�������棬�W�jͨ�^��Ԫ֮�g������Á팍�F������Ŀǰ���S���I��Ĺ�
���\��ϵ�y�м��_ʼ���ã����ڻ����O�䡢�˷����ѡ���݆�C�����D���Cе��늄әC���I��ȡ�����^�õ�Ч���������W�j�Ĺ��������ЌW����֪�Rֻ��һЩ�ֲ����أ�����������I��߉˼�S�Įa��ʽҎ�t������\�������^�̲��܉��ጣ�ȱ�����ȡ�
D.����ģ�����W���\�������Ҫ�������_�Ĕ��Wģ�ͣ��m�����\���`�ٺ�����ģ��Ҏ�t���M��ģ�������Ϳ��Ԍ��Fģ���\������ܻ������ǣ����ڏ��s���\��ϵ�y��Ҫ�������_��ģ��Ҏ�t���`�ٺ����Ƿdz����y�ģ�������Ҫ���M���L�ĕr�g�����ڸ����ģ��Ҏ�t���`�ٺ������϶��ԣ��y���ҳ�Ҏ�t�cҎ�t֮�g���Pϵ��Ҳ�����fҎ�t�С��M�ϱ�ը���F��l������������ϵ�y�ď��s�ԡ�����ԣ��ɕr���l���������g������ģʽ�������g��ӳ���Pϵ�����������^���ķǾ��ԣ��@���`�ٺ����ΠҎ�t��ֻ������Ҏ�����`�ٺ����Π������̎�������������Ρ����λ�ֱ����Ҏ�t�Π���M�����Խ��ƴ��棬�Ķ�ʹ�÷Ǿ���ϵ�y���\��Y���������롣
E.���ڹ��Ϙ�ķ�������Ӌ��C���������cԭ������֪�R������֪�R�Ԅ��o�����ɹ��Ϙ䣬���Ԅ����ɹ��Ϙ�������^�̡��\���^�̏�ϵ�y��ijһ�����_ʼ���������Ϙ䲻���ᆖ����ʲô���F�@�N�F��������һ���f�A���Ϙ䣬ͨ�^���˹��Ϙ�Ć��lʽ��������K������ϵĸ���ԭ�����ᆖ�^���У���Ч������ʹ��ϵ�y�Č��r�ӑB�������������\���^�̵��M�С����ڹ��Ϙ���\�����������˼�S��ʽ���������⣬�ڌ��H�Б����^�࣬������c������ע�Y��ʹ�á�
4.3 ���ܷ���ϵ�y�Ļ����OӋ˼��ͽM��
4.3.1 ���������\��ϵ�y�Ļ����OӋ˼��
�S���˹����ܼ��g��Ѹ�ٰlչ���e��֪�R���̡�����ϵ�y���˹��W�j���\���I���е��Mһ�����ã���ʹ�˂��������\�����}�M�и��������cϵ�y��ƴ�������^�\��ϵ�y�����ܾ���������Ч�ث@ȡ�����f��̎���������������\����Ϣ���Ķ����Ќ��o���h���µ��\�������M�гɹ���B�R�e�͠�B�A�y�������������\��ϵ�y�����ܲ�����ζ����ȫ�����˵�������ӣ������ų����\��ϵ�y֮�⡣���`�C�����κ��˹�����ϵ�y���о�����������ȫ�[Ó���X��ϵ�y�ą��c��ֻ���ǡ��ˎ͙C���͡��C���ˡ�����������ϵ�y����Ҫ�M�ɲ��֡��ɴˣ������@�Ӂ����x�����\��ϵ�y��
�������ˣ��������I�ң�������ģ�M�X���ܵ�Ӳ�������Ҫ���ⲿ�O�䡢���������Լ�֧���@ЩӲ����ܛ�����M�ɵ�ϵ�y��ԓϵ�y�Ԍ��\�������M�Р�B�R�e�c��B�A�y��Ŀ�ġ��@Ȼ��ԓ���x�µ������\��ϵ�y�����������c����1������һ���_�ŵ�ϵ�y��ϵ�y�������ڌ��Hʹ�õ��^���У���ͬ�h���M����Ϣ�������^���в����M�����Ҿ߂�������ߵĝ��ܡ���2��������Ӌ��CӲ���cܛ���M�ɵ�ϵ�y�����ֲ�ͬ�ڳ�Ҏ��Ӌ��C����ϵ�y�������д_�����㷨�ͳ���;���������\��ϵ�y�Ǹ����\���^�̵���Ҫ�����������I�ҵ�֪�R�������_���\���Ŀ�ġ���3��������һ���˹�����ϵ�y���x���_ģ�M���X���ܵ�Ӳ���O�估ܛ������һ�����ֲ��ų��˵����ã�ͬ�r��Ӳ�������H�H���ƞ������T���Z����ʽ���yӋ��C��
4.3.2 ���������\��ϵ�yƽ�_�Ļ����M��
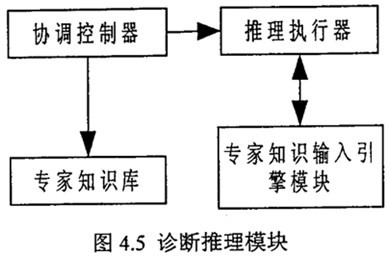
����ʹ�õ������\��ϵ�yƽ�_���^�錍�õĈD�λ����ܹ����\��ƽ�_������ͨ�õ����ܻ��\��ϵ�yƽ�_�����OӋ˼���ǣ������˼�S������ϵ�y������Ҏ�ɺ͔��Wģ���ЙC�ؽY�ϣ����á����`��ر���ϵ�y������B�����D�ڵõ����õČ���֪�R�Ļ��A�ϣ����������͌W�����{������֪�R���{�������Y����ϵ�y���˹����ܵ����¼��g�ЙC���ںϣ����к���ͨ���ԡ��m���ԡ����e�Լ����F�ԣ�ͬ�r�����еĈD�λ�ģ���W�j����֪�R���_��ʽ���ֲ�ʽ�����\��������Ѹ�ٵ��������������h�̷���������ʹϵ�y�_�����^�ߵ����ܻ�ˮƽ�������\��ϵ�yƽ�_���������N���������һ������֪�R�죨��D4.2��ʾ�������N���������ǣ�
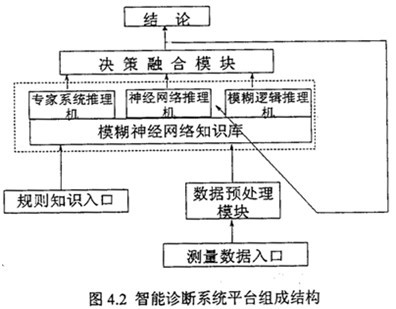
��1��ģ��߉�������棻��2������Ҏ�t�������棻��3���W�j�������棻�������\��ϵ�yƽ�_���ɵĿƌW�ԣ��҂����ԏ����������������ጣ�
a.����ϵ�y��ģ��߉��֪�R̎����ģ�M�����˵�߉˼�S���˹��W�j��֪�R̎����ģ�M�Ąt���˵Ľ��˼�S�C�ƣ������������˼�S�^���У�߉˼�S�����˼�S��������˼�S��ȱһ���ɲ����Ƿdz�����ػ���Y�϶��γɵ��ЙC���w��
b.ģ���\���Ǹ���ģ������Փ�����g�c���Ϡ�B���g���c���Ϡ�B���g��ij�Nӳ���Pϵ�������ׁ��\����ϡ�
c.�����W�j����ԭ�t�����e���Y���ؓ��������롢�Ɯy��ӛ�������m�����ԌW�������к�̎����sģʽ�Ĺ��ܣ�ʹ�����ڌ��H�����������Ķ���ϡ����^�̡�ͻ�l�Թ��ϡ�������sϵ�y�ıO�y���\���аl�]���^�����á�
4.3.3 ���������\��ϵ�yƽ�_����Ҫ���g
ϵ�y����Ҫ���g���������ܻ������㷨������̎�������D�λ�ģ���W�j����֪�R�졢�C�ϵĄӑB�ӎ씵��ͨӍģ�K��
���ܻ������㷨��ϵ�y����،�����ϵ�y����C���W�j����C��ģ��߉����C�ЙC�Y�ϡ������\�У���ְl�]���������㷨�ă��ݣ��˷����еIJ��㣬ʹ���������_�����m���ڶ�׃��������������Ŀ�˼����^�̵ď��sϵ�y��ͬ�r������M-ARY��Փ�������Y���M�Ѓ���������ͨ�^�vʷ�����������ھ������W�����{������֪�R���{�������Y�����ܳ�ֱ��C�����Y���Ĝʴ_�ԡ�ͨ�û��OӋ��ԓϵ�y����Ҫ��ɫ���b�d��ͬ�I��Č���֪�R���܌���ͬ�I��Ć��}�M�����ܻ�����Q�ߡ�
����̎�������OӋ������õؽ�Q�����Ŀ�����������ϵ�y�У���ģ���ֵ���y�������M��ģ���������Cϵ�y�����Ŀ��_������
�D�λ���ģ���W�j����֪�R�죺ϵ�y���ÈD�λ�ģ���W�j����֪�R���_��ʽ����ͻ�ƹ���֪�R�͌���֪�R�ČW�����@ȡ�����_�c���õ�ƿ�i���}��ϵ�y��һ�����صĽY���Á�����ء��f�����ռ��ʹ惦����֪�R������Ҫ�κ�ģ�ͣ��@���ڛ]�Д��Wģ�ʹ��ڵĵط��e���ã���ʹ�Ñ������������Ì���֪�R��Q���H���}��˼·�c������
�C�ϵĄӑB�ӎ씵��ͨӍģ�K��ͨӍ�����w�Y�����ֲ�ʽ�OӋ���֞�ɂ��ӴΣ�һ���棬ͨӍģ�K�c����C֮�g���ÿ͑��C/�������ķ�ʽ������TCP/IP�f�h������ͨӍ����һ���O�úã���ʼ�K̎���\�Р�B������Cһ����Ҫ��Ո����������ͨӍģ�K�������Ո���������ͨӍģ�K�����C�ϸ�������C�Ĕ���Ո����������Č����������Ո���ٌ��Č���õ���������o������C����һ���棬����ͨӍģ�K�c�ض�����֮�g�����{�ÄӑB�ӎ���k���M��ͨӍ��ᘌ���ͬ�Č����{�ò�ͬ�ĄӑB�ӎ�Ϳ��Ԍ��F����ͨӍ��
�W�j���h���\�ࣺͨ�^�O������\�༼�g�cӋ��C���g�ĽY�ϣ��������_����Ӌ��C������������ش���I��Ҫ�P�I�O���Ͻ�����B�O�y�c���ɼ��O���B���������ڼ��g�������Ŀ���Ժ���������ģ����O���\���M���h�̷������\�ࡣ
4.4 ���ܷ���ϵ�y���OӋ�_�l
4.4.1 �D�λ��Č���֪�Rݔ������ģ�K
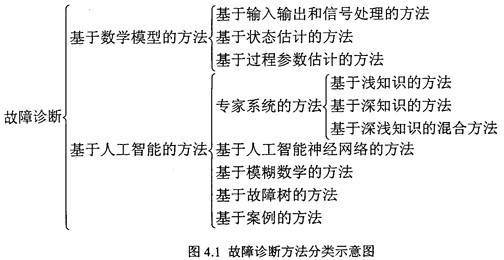
����֪�Rݔ������ģ�K������D4.3��ʾ��ԓģ�K�ĺ������ÈD�λ��ķ�ʽ�����\���������̈D��ԓ���̈D���ɷֲ������Ӵ��ϵĶ������c�����c�g���B�����M�ɣ���D4.4���\���������̈D�У��Ӟ顰�������ӣ��@��Ĕ����������ǜy����������������ݔ����������B���z��ӛ䛵ȶ�N�V�����x�ϵą��������g�Ӟ顰���ϬF�ӣ��@��İY��F���������ֱ���^�쵽�ĬF���繤���l������������������׃���ȣ���Ҳ�������g�ӵĬF����N�V�����x�ϵĬF�����όӞ顰����ԭ�ӡ����B�����B�˴����P�ġ��������c�����ϬF���ϬF���c������ԭ���@�Ә����\���������̈D��
4.4.2 �M������ģ�K���OӋ
����ģ�K��һ���[���ں��_������Ӌ��ģ�K�����ĽY����D4.5���f�{�������Á�����������C�Ĺ������f�{����������c����֪�Rݔ������ģ�K��֪����һʾͬ�Ĺ��ϣ��䡰�����ӡ��������ϬF��ӡ���������ԭ��ӡ���������֮�g���B���Pϵ�^����ͬ���f�{���������nj��������ӡ��������ϬF��ӡ���������ԭ��ӡ���������֮�g���B���Pϵ�Ԅ��D���������M���Pϵ���������������������\�����
��1������ϵ�y����
�������YՓ�IJ�ͬ�������ɷ֞龫�_
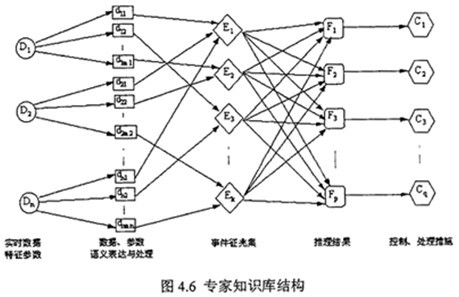
�����Ͳ����_�������������^�̵IJ�ͬ���ɷ֞��������ǡ����������ͻ�������������D�λ�����֪�R��Y�������������_������
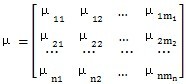
����ϵ�y������Ҫ�Ǐ�֪�R������Ĕ�������D={D1��D2������Dn}���l������֪�R����ÿһ�����c������һ��������Z�x���_�͔������������@ȡ���r�����c֪�R���������������Z�x���_�͔��������M�������Է������ó�������ϵ���ļ��ϣ�
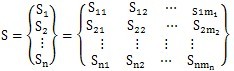
��4.1��
ʽ�У�S
1 ��S
2������S
n�քe��������r�����c����֪�R�씵���c��������ϵ�����Ӽ������������飺

��

,S
n=
��m
1��m
2������m
n�քe��֪�R��������c���Z�x���_������
�������������Z�x���_�����ҵ��c����Ҏ�t�㺯�γ��˸��N�¼�����E={E1��E2������EK}�����N�¼�������ݔ����Ϣ���¼���Ϣe={e1��e2������eK}���¼���Ϣ�c�����������Z�x���_��������ϵ����Ҏ�t���c������_�������P����E1���Z�x���_���飺
E1={��d11��d25�ţ���d32��d48��}���te1=max{min��s11,S25����min��s32,S48��}��
�����Y���c����֮�g���þW�j�B��ģʽ��ÿ���������B�ӵę�ֵ��Ϣ

���¼���Ϣ�c��ֵ��Ϣͨ�^�\���Pϵ�ó������Y����

������j=1��2��3������p ��4.2��
���������Y����֪�R�������ؾ��п��ơ�̎����ʩ���㘋�������ܻ�ϵ�y�Č���ϵ�y����ģʽ��
��2��ģ��߉����
ģ��߉��Ҫ����ģ��Ҏ�t���M��ģ��߉�Pϵ�\����K�ó������Y����ģ��Ҏ�t����ÈD4.6��ʾ�Č���֪�R��Y�������Ȍ������������M��ģ����̎�����M������C�Ĕ����c����������֪�R���в�ͬ���Z�x���_��ͨ�^�������x���c����ģ���`�ٺ������ó������Ĕ����������ڲ�ͬ�Z�x���_�µ�ģ���`�ٶȡ�
���ڔ���D
1�������Z�x���_d
11��d
12������

�`�ٶȿɸ�����ͬ��ģ���`�ٺ���������քe��

��

��ͬ�ӵأ����ڔ���D
2�������Z�x���_d
21��d
22������

���`�ٶȿɸ�����ͬ��ģ���`��������քe��

����

���Դ���ƣ�����г���ͬ�����������ڲ�ͬ�Z�x���_�µ�ģ���`�ٶȡ�
��4.3��
ͬ�r������֪�R���е�ģ��Ҏ�t�������������Z�x���_�c�¼�����֮�g�����B����ֵ��1�����B����ֵ��0��ԭ�t���ɵľ��Dmk���¼������c�����Y��֮�g�����ҽo���ę�ֵ���ɾ��Dkp�����γ�ģ���Pϵ���Rc=Dmk��Dkp��
��K��ģ�������ĽY����ͨ�^ģ��׃�Q��ʽ�@�ã�

��4.4��
ʽ�С��q����ģ�����ӣ�����Sup-T�ϳ��\�㷽�����F��
��3���W�j����
�����D4.6��ʾ�Č���֪�R�Y�����W�j�������ӽY����
��һ�Ӟ锵�������Z�x���_�ӡ�ÿ�������������������Z�x���_���������B�ә�ֵ��1����������һ��������ݔ��Di,���j�l�Z�x���_��������֪�R���������������ݔ���ֵ��ij������Sigmoid����Ԫ���Ժ���������yij��
�ڶ��Ӟ��¼����ӡ���������֪�R�죬���ɂ��Z�x���_�ļ��ϱ㘋����һ���¼������B������ֵ���_�������Pϵ���γ���k���¼���ÿ���¼���ݔ��ͬ�Ӹ����������Z�x���_�������B�ә�ֵ��Sigmoid ��Ԫ���Ժ����_�����������¼�Ei���������Z�x���ļ��Ϟ�{d1��d2������dj}�¼�ݔ���飺
ʽ�У�w
k�����B����ֵ����
k����ƫ����̖
�����Ӟ������Y���ӡ�ÿ���¼�ݔ��E
i�c�����Y��F
j֮�g�����B�����x�Й�ֵ
������ģ�������������Y���飺

������i=1��2��3������k��j=1��2��3������p ��4.7��
�����㷨�_�����M��������ʽ�x��������ʽ���x�����ք��x����Ԅ��x��ɷN��
�ք��x����Ҫ�������w���������ϵ�y���\�Р�r���M�У����I��֪�R�Ͷ���֪�Rȱ������r�£���Ҫ�x���W�j�����������x���W�j�cģ��߉�����ĽM�ϣ����I��֪�R���^�S�������_����r�£���Ҫ�x��ϵ�y�����������x��ϵ�y�cģ��߉�����ĽM�ϣ�Ҳ���x��ϵ�y��ģ��߉���W�j����ͬ�r�\�У��ڌ������������Z�x���_�S������r�£���Ҫ�x��ģ��߉�����������x��ģ��߉�c����ϵ�y�����ĽM�ϡ�ģ��߉�c�W�j�����ĽM�ϣ�Ҳ���x��ϵ�y��ģ��߉���W�j����ͬ�r�\�С������ڃɂ���������ͬ�r�M�Еr���t�M�������YՓ�ă�����
�Ԅ��x���������ʽ�Ƿքe�M�Ќ���ϵ�y��ģ��߉���W�j�����������������YՓͨ�^�����Q�ߺ��γ���K�YՓ�����W�j�Ęӱ��M�ЌW���������W���Y�����{������֪�R�죬������һ݆��������˲����ѭ�h�M�С������Y��������
�����Y�������F��һ���}���Еr����ì�ܡ���ˣ������˃����㷨��
a.�OӋ׃��
�����Ҫ��Q�Ć��}��1��2��3������p��
ģ��߉���팦���}��ݔ����Ff1��Ff2��Ff3������Ffp
�W�j���팦���}��ݔ����Fn1��Fn2��Fn3������Fnp
����ϵ�y���팦���}��ݔ����Fe1��Fe2��Fe3������Fep
�OӋ׃���飺X={xf��xn��xe}
b.Ŀ�˺���
c.�s���l��
0��xf��1��0��xn��1�� 0��xe��1��xf+xn+xe=1
d.����Ŀ�˺����c�s���l��������⡣
�քe��f��X����xf��xn��xe��ƫ����������Ŀ�˺�����Ǿ��Ժ��������������ֲ���Сָ���F�����üs��׃�߶ȷ���⣬��K����������xfh��xnh��xeh��
e.�����Y��ݔ��
��↖�}1��xthFf1+xnhFn1+xehFe1
��↖�}2��xfhFf2+xnhFn2+xehFe2
��↖�}3��xthFf3+xnhFn3+xehFe3
����������������������������
��↖�}P��xfhFfp+xnhFnp+xehFe
�M����������Cϵ�y����،��������������ЙC�Y�ϡ������\�У����������㷨�ă��ݣ���ְl�]���������㷨�ă��ݣ��˷����еIJ��㣬ʹ���������_���˸�ˮƽ���ڌ��H�����^���п��`����x�����е�����һ�N��ɷN������ʽ���\�У�Ҳ�ɲ������N����ͬ�r�\�С��������Pϵ��ϵ�y������ģ�������㷨�������¼���ϵ�y�������W�j������Ҏ�t��ϵ�y������Ҏ�t�D�Q�㷨���@���N����ģ�Kͬ�r���ڡ����M��؟��ͨ�^�vʷ�������ھ������W���_�������@Щģ�K�Ȳ������ء�
4.4.3 ��������ģ�K���OӋ
����������ɵĹ�����Ҫ�Dzɼ�����ϵ�y���r���������ɘӵ��Ĕ����cؕƽ֪�R���н�����ϵ�yģ��ݔ�빝�c�M�Ќ��ȣ��ٰ�������������Ҫ����������ٝʽ��ݔ�딵��ͨ�^ָ��ͨӍ�f�h���f�o����C����˔���ݔ��������ϵ�y��ϵ�yʹ�Õr���rϵ�y�c����ϵ�y�Ĕ���ϵͨ���������@�N�������f�������`��TCP/IP����ͨӍ�ȷ�ʽ�M�Ђ�ݔ�����ʹ�Õr�����Ԍ������ɼ�ϵ�y�c����ϵ�y��IP���B�ăɂ���ͬ����λ�ã�����ϵ�y�������`���ԡ��C�ϵ�ͨӍģ�Kʹ��ϵ�y�ܿ��ٷ�����c�F�����r�������F���f��ͬ�r����������߀����ɔ����ĉ�̎��������ӛ��c�طš�
4.5 �W�j���h���\���
4.5.1 Ӌ��C�W�j���g�İlչ
�S��Ӌ��C���g��Ӌ��C�W�j���g����ý�w���g��ͨ�ż��g��Ѹ�ٰlչ���h����Ϣ������ʹ��Խ��Խ���㣬�e��INTERNET�W�Ŀ��ٰlչ��ʹ�ã�ʹ�ù����\���h�x���ϬF�������F�o����͕r�g���Ƶ��h�̹����\�����˿��ܡ�
INTERNET��ȫ��������Ӌ��C���B�W�j������������APPANET�lչ���ݻ������ġ�INTERNET�ĺ��ļ��g��TCP/IP�f�h��Web ���g������TCP/IP�f�h�nj��F���B�W�j�ͻ������Ե��P�I������ͨ�^����INTERNET �ϵĸ��N�W�j�ŵ��Ի��B�����Fͨ�š�
4.5.2 �����\��ϵ�y����ͨӍ�ӿ�
���ĵ������\��ϵ�y����ͨӍ�ӿھ���ʹ��TCP/P�f�h��ֱ��ʹ�ó����_�l�������ṩ�ĭh�����ֶΣ���Winsock���팍�F�h�̔���ͨ�Ź��ܡ�ԓϵ�y��ͨӍ�ӿ��������������c��
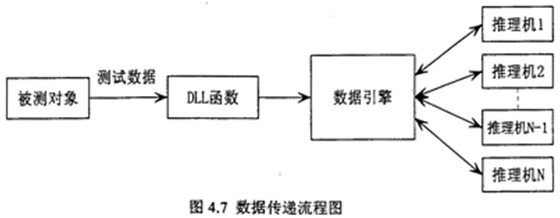
l�����w�Y���ǰ��ֲ�ʽ�Y���OӋ�ģ����ÿ͑��C/�������ķ�ʽ������������һ���O�úã���ʼ�K̎���\�Р�B������Cһ����Ҫ��Ո���������������������Ո�����������������C�ϸ�������C�Ĕ���Ո����������Č����������Ո���ٌ��Č���õ���������o������C�����w�Y����D4.7 ��ʾ���������c�͑��C֮�g����TCP/IP �f�h��
2����������ʹ�õķ�ʽ��һ���{ԇͨ�^�ˣ�����������һֱ�\�У������M���κβ��������є������濴��һ����������������ԓ�M���h�̲�����һ����r�²��M�в�����
3�����������c�ض�����֮�g�����{�ÄӑB�ӎ���k���M��ͨӍ��ᘌ���ͬ�Č����{�ò�ͬ�ĄӑB�ӎ졣
���������������c���D4.7 ��ʾ������������ɵĹ�����Ҫ���{�Ô����ӑB�B�ӎ졣���ĵ����ܹ����\��ϵ�y�Ĕ������������D4.8 ��ʾ��
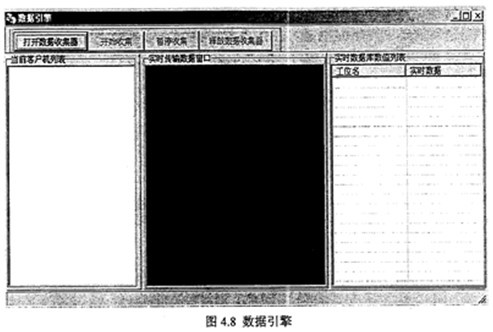
���������c�ض�����֮�g�����{�ÄӑB�ӎ���k���M��ͨӍ���Γ������_�����ռ�������������ռ��������M�딵���ʂ��ռ���B���Γ����_ʼ�ռ������M�딵���ռ���B���ռ����O�y�ɼ�ϵ�y���l�͵Ĕ������M�Д�����̎������̎����Ŀ���nj����O�y�ɼ�ϵ�y���l�͵Ĕ���̎����׃������CҪ��Ĕ�����ͬ�r�z�y�����\������C�Ĕ�����Ո��B���������\������C�M�й����\������r�����������桱���ռ����Ĕ����c����֪�R���н�����ϵ�yģ��ݔ�딵�����c�M�Ќ��ȣ��ٰ�������������Ҫ���ض�������ʽ������C��Ҫ�Ĕ���ͨ�^ָ��ͨӍ�f�h���f�o����C���@Ȼ�����������f�ĄӑB�ӎ죨DLL�{�ú��������P�I��һ�h���ڔ�������Ļ��A���҂����Ծ����Լ����ص�ͨӍ�ӿڻ��DZ��ܵ�ͨӍ�ӿڡ������±����������Լ���DLL�{�ú�����
�ӑB�B�ӎ�Ľӿں������£�
extern��C��__declspec(dllexport)bool__stdcall CreateContainer()��
��Ҫ���ڳ�ʼ���ӑB�B�ӎ���������P�YԴ������ֵ���Ƿ�ɹ��Ę�־��
extern��C��__declspec(dllexport)void__stdcall StartData()��
��Ҫ������ӑB�B�ӎ�lһ���_ʼ�ռ���������̖��
extern��C��__declspec(dllexport)void__stdcall StopData()��
��Ҫ������ӑB�B�ӎ�lһ��ֹͣ�ռ���������̖��
extern��C��_declspec(dllexport)char*__stdcall GetData(char*)��
�@����������Ҫ����Ҫ������������DLLȡ�������еą�����ָ��DLL���f�Ĕ����c���Q�б�����ʽ�飺
NAME1,NAME2,NAME3,������
DLL�������صĄt�ǔ����б�����ʽ�飺
VALUE1,VALUE2,VALUE3,������
����������O����һ���ĕr�g�g���{���@���������M��ȡ����
���磺��DLL���f�Ĕ����c���Q��
Tag__No1,Tag__No2,Tag__No3��������
DLL���صĔ����б�飺123.46,23.4,34,������
extern��C��__declspec(dllexport)void__stdcall FreeConiainer()��
��Ҫ����ጷńӑB�B�ӎ���������P�YԴ��
4.5.3 �W�j���\���
�W�j���h�̹����\��Č��F�����P�I���h�̔����Ă��͡����A���������Q̎���������\��ϵ�y�h�x�����O��F����ֻҪ���ϬF�����Ϝyԇ�����ܼ��rͨ�^�W�j���͵������\��ϵ�y�У������\��ϵ�y���܌��F�W�j���h�̹����\�ࡣ�����ܹ����\���е�����C�M������r��ͨ�^����������ӑB�B�ӎ�DLL������Ո�������@Щ����������r��Ҫ�Ĺ�����������׃��ֵ���ӑB�B�ӎ�DLL�����tͨ�^�W�jֱ�ӏĹ��ϬF���yԇ�ɼ�Ӌ��C�еõ�������Ϣ�����������������̈D��D4.9 ��ʾ��
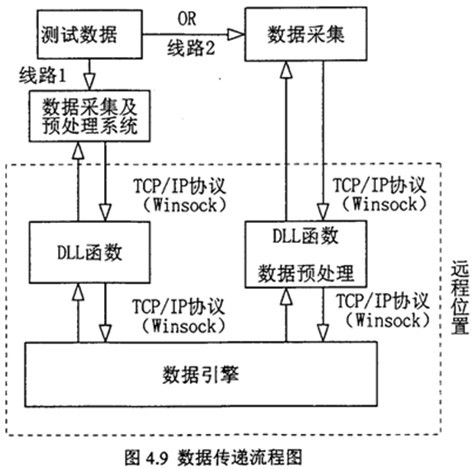
�������̈D��֪���Ĺ��Ϝyԇ�������������棬�ЃɷN����̎����ʽ��һ�N�ǹ��Ϝyԇ�����ɔ����ɼ�ϵ�y�ɼ������M���A̎������������̖����̎�������C����Ĺ�������������Ȼ��l�ͳ�ȥ���ӑB�B�ӎ�DLL�����tͨ�^�W�j�����@Щ��������������ͬ�r��������C��������Ո�Ĺ�������׃��������Ո�Ĺ�������׃��������ֵ�ҳ�������������Ҏ���ĸ�ʽ���ͽo��Ո����������C����һ�N�ǹ��Ϝyԇ�����ɔ����ɼ�ϵ�y�ɼ���һ����ʽֱ�Ӱl�ͳ�ȥ���ӑB�B�ӎ�DLL�����tͨ�^�W�j�����@Щ������Ϣ������Ȼ�����M�Д����A̎������������Ϣ����̎�������C����Ĺ�������������ͬ�r��������C��������Ո�Ĺ�������׃��������Ո�Ĺ�������׃��������ֵ�ҳ����ٰ���������Ҏ���ĸ�ʽ���ͽo��Ո����������C��
����C�õ��������淵�ص������������O���õ�����Ҏ�t���M����������ɾW�j�h���\�ࡣ
4.6 �����b�þW�j�����ܻ��\��ϵ�y�ļ���
�������õľW�j�������ܻ������\��ϵ�yܛ���ɃɴֽM�ɡ�һ�����ǹ�����̖�ɼ��������A̎��ϵ�y����һ�����LjD�λ��������\������ϵ�y���ɲ�����������ģ�Ҫ���F�����\��ľW�j�������ܻ������茢�@�ɲ��ּ��ɞ�һ�����w��ϵ�y���������ɼ��������A̎�����������ͼ����������\���ںϞ�һ���ЙC�����w��ͬ�r�ֱ����@�ɲ��ֵ����������ԡ����ɵ�Ŀ�������ׂ����棺
1�������ɼ���ԭ��ʽ�ɼ���׃�������Ĵ��A��ʽ��׃��
2�������Ñ��M�ж����_�l��
3���������Ϳɸ����Ñ���Ҫ���M���x��
4���M���p���Ñ��������ό���֪�R�r�Ĺ�������
5������̎���Б����]ʹ���ض�׃����(׃�����̶������Ԝp���Ñ����̹�������
�������õļ���ϵ�y��ʹ�õĔ������;�·��D4.8�о�·1�ķ�ʽ��
4.6.1�������������ī@ȡ������
�����\���У���Ҫ�����Ĺ����������������ڲ�ͬ�Ĺ��ϣ�����Ĺ���������ͬ������ʹ���ɺ��ϵ�y���m�ø�����O������\�ஔ�У����M�й�����������������ȡ�r�����M���ܶ�ؿ��]���N�������������������
�������D�Cе��������ȡ���������У�
l������׃����ȡ���l����������
1/5���l��1/3���l��l/4���l��l/2���l��0. 43��0.48���l��0.75���l��l���l��2���l��3���l��4���l��5���l���R���D�٣�renxuan��ÿ���l��ֵ��һ��ֵ�o��������renxuan�����׃���l��������ȡ�l�����������r��renxuan׃���Ñ��ɸ����Լ�����Ҫ���O��renxuan�������l��ֵ��������Ҫ�����l�ʣ��trenxuan�����D�l���X������
2����ӷ���
������S�� ��һ��ֵ��
3����ӷ�����
�������^������ͻ׃�����������������Ƅӣ���������ͻ׃����һ��ֵ��
4�����܉�E
�E�A���p�h�E�A�����������p�E�A��Ҏ�t����Ҏ�t�Uɢ���Ɂy����һ��ֵ��
5��ʸ���^��
��׃��ʸ����ʼ�c���S�����^�m�������ٕrʸ����u�������\�к�ʸ����u�pС��ͻ׃����׃���քe�ò�ֵͬ��ʾ��
6�����Ѕ���
����S�D��׃��������Sؓ��׃��������S�͜�׃��������S����׃��������S����׃��������һ��ֵ��
�yӋ�������N��������׃��������21��׃�������Ñ��s���������O����21��׃����׃��������ӛ�����������׃�����У��Ա��ԃ��
������������ȡ�ڔ����ɼ����A̎��ϵ�y����ɣ���ϵ�y���O���IJɼ��r�g���ɼ�һ�M������̎��һ�M�������l��һ�M������
����ʹ�õĔ����l�ͷ�ʽ�nj�����������׃�����c����ֵ�M���ִ�������ʽ�顰D|׃����1��ֵ1��׃����2=ֵ2��������׃����n��ֵn ,|^^^^��������TCP/IP�Ӽ��g������stocket �B�ӣ������������������͵��������˿��ϡ�
4.6.2 �ӑB�����B�ӎ�ij����OӋ���c����ƽ�_���B��
��������ϵ�y���ɵ�Ҫ�ӑB�����B�ӎ�ij��������M�Д������ա�����������������ƽ�_����Ҫ������������ֵ��Ȼ���@Щ����������ֵ�c������������ƽ�_������׃�����M���µ��ִ����l�͵�������������ƽ�_���ն��ϡ�
ԓ������4.5.2�������ĸ�ʽ������������GetData(char*�������K����ɔ��������������ؽM�����������OӋ�r�����x���������������Ԝp�������r�g��
�����\������ƽ�_�����M�й����\�������r�����ö��r�ķ�ʽ��ӑB�����B�ӎ���Ո����������������r�g���O�����Ը����Ñ��������O����һ�㑪���]�����ɼ����A̎������ĕr�g���O����Ո�����ĕr�g����t����Ո���Ĕ����������c�ϴ���ͬ�Ĕ�������Ҳ���ܰѕr�g�O�����^�L���@�Ӯ������˿ڶї��^���r�������Q���f���������F�\������©�\�ĬF��
�����\������ƽ�_��ӑB�����B�ӎ���Ո�Ĺ���������������Dzɼ��A̎��ϵ�y���������������еĔ���������]�У��t�ӑB�����B�ӎ���������ԓ���������صĔ������㣬�t�]���\��Y�������������������Ո�Ĺ������������ڲɼ��A̎��ϵ�y�������������Л]�У������DZ�횵Ĕ������t���ڄӑB�����B�ӎ��е�GetData(char*�������K���M��̎�����õ�������������Ҫ�Ĕ�����
4.6.3 �\��Y��ݔ��ƽ�_���OӋ
����ʹ�õ����ܹ����\��ϵ�y�����\��������ͬ�r�����\��Y���l�͵����C��Stocket�˿��ϣ��˿ڔ���2049��������ʽ���£�
l���ڽ���Stocket�B�ӕr�����������͌��ҽ��h��
D|������1�����ҽ��h1��������2�����ҽ��h2��������������n�����ҽ��hn, ^^^^
2���\��Y��ݔ����
R|Result1,Result2,����,Resultu,| ^^^^
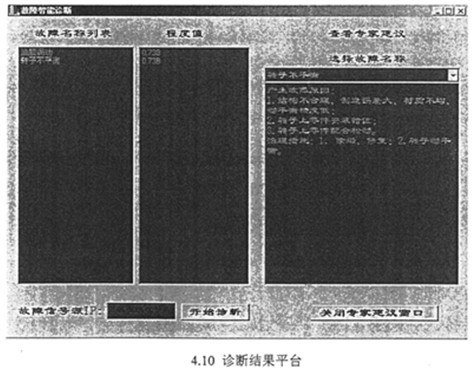
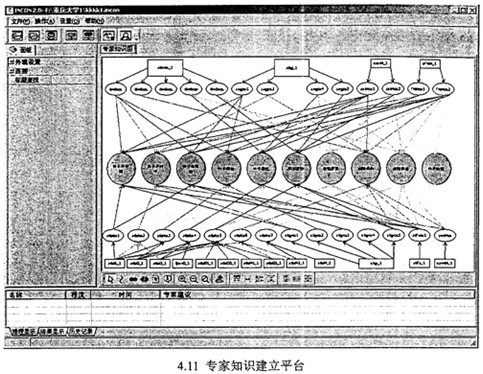
�����o���Ĕ����˿ڼ�������ʽ�����ɰ��Ñ���Ҫ���OӋ�\��Y��ݔ��ƽ�_���\��Y�����o���\����ϵ����Q�����ϰl���IJ�λ�����ϰl���ĕr�g���̶ȡ����ڲ�ͬ�Ĺ��ϣ���ʾ���ϰl���Ŀ���ԭ�o�������Č��ҽ��h��S�����ȡ��D4.10�鱾�ļ���ϵ�y���\��Y��ݔ���Ñ����档�D4.11�鱾�ļ���ϵ�y�Č���֪�R�콨�����\������ƽ�_��
4.7 �����Y
�������U���˹����\��ķ����Ļ��A�ϣ����c��B�ı�����ʹ�õĹ��������\��ϵ�y���OӋ˼�뼰�M�ɣ������������\��ϵ�y�ĽM������ԭ�t���h�̾W�j�\�������Ă��fԭ�t��ָ���˱��������\��ϵ�y�Ĕ���ͨӍ�ӿڳ�����OӋ������ͨ�õĄӑB�B�ӎ�ӿڳ����ڴ˻��A�ϣ������˾W�j�������ܻ��\��ϵ�y�ļ��ɷ����������ij����OӋ��������������ʹ�õ������\��ϵ�y�M���˼��ɡ�